下午好🌅🌅🌅
本答案参考通义千问
你的项目非常具有现实意义,尤其是在教育和智能教室管理领域。你提到的“座位是否被占用”是核心目标,而如何将二维图像中的检测结果映射到三维空间中的固定座位位置,是实现该目标的关键难点。
✅ 一、问题核心总结
你希望:
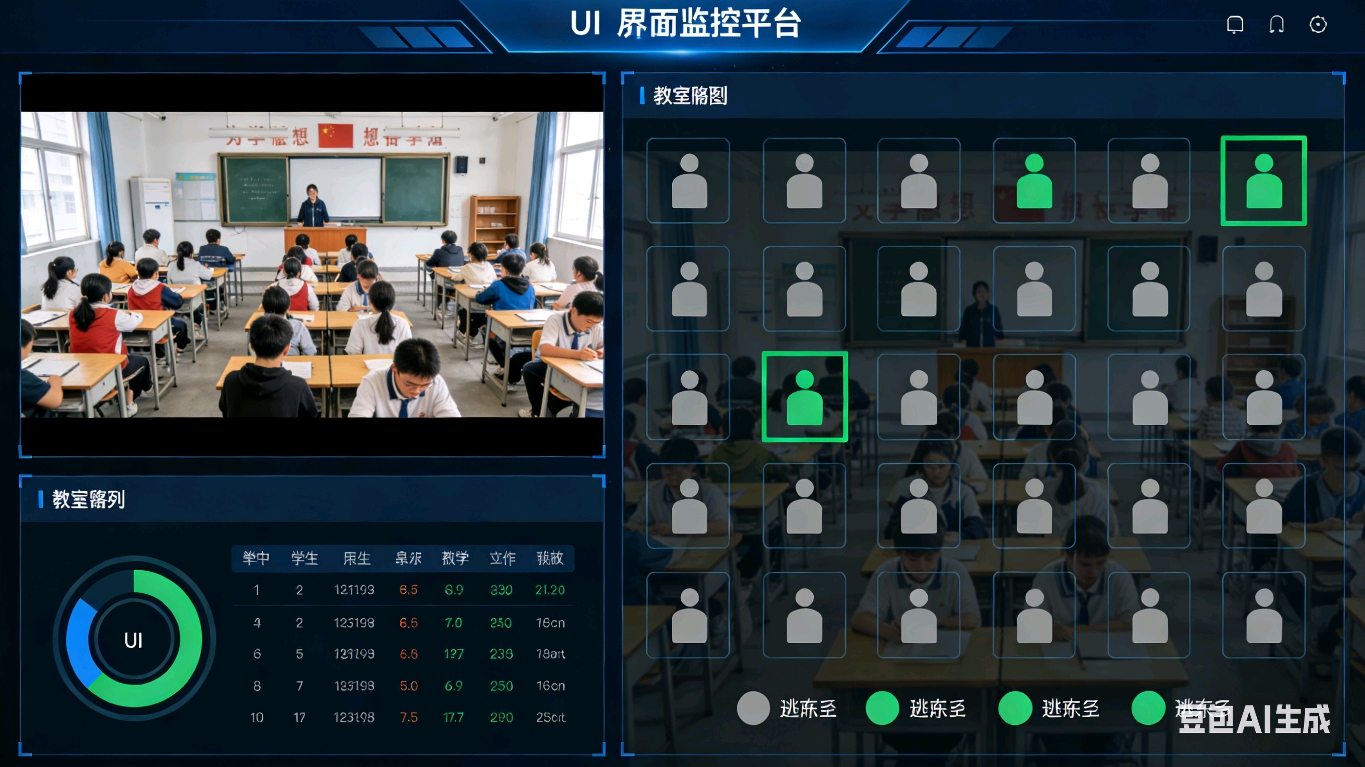
- 根据摄像头画面中的人的位置,判断每个固定座位是否有人;
- 前端显示绿色/灰色表示状态;
- 不进行人脸识别或身份追踪,只关注“是否有座位被占用”。
✅ 二、技术思路设计建议
1. ROI 区域定义与映射
重点:建立“座位坐标系”与“图像坐标系”的映射关系。
解决方案:
-
步骤一:标定座位位置
- 在实际场景中,为每个座位定义一个固定的 ROI(Region of Interest)区域。
- 可以通过手动标注或者使用标定板(如棋盘格)来计算相机的内参和外参,从而将3D 空间中的座位坐标转换为 2D 图像坐标。
-
步骤二:图像坐标与座位的映射
- 使用 Homography(单应性)变换 或 投影矩阵 将图像中的矩形区域(ROI)映射到对应的座位。
- 如果摄像头是固定机位,可以预先采集多个帧,计算每个座位在图像中的边界框(bounding box)。
-
步骤三:实时检测与匹配
- 对每一帧图像进行人体检测(如 YOLO、SSD、OpenPose 等),获取人的 bounding box;
- 判断 bounding box 的中心点是否落在某个座位的 ROI 内;
- 如果是,则标记该座位为“占用”;否则为“空闲”。
注意: 这里 不能仅仅依赖 bbox 中心点,因为人可能部分在座位上,但中心点不在 ROI 内,这种情况需要更复杂的判断逻辑(比如面积重叠度)。
2. 座位与人的归属关系
重点:以“座位为中心”维护状态更稳定,适合长期监控。
推荐策略:
-
以“座位为中心”:
- 每个座位有独立的状态(占用/空闲);
- 每次检测后更新所有座位状态;
- 优点:结构清晰,便于状态维护和可视化;
- 缺点:需要频繁检测,对性能有一定要求。
-
以“人为中心”:
- 每个人有一个 ID,记录其所在座位;
- 优点:适合跟踪多个人;
- 缺点:如果遮挡或多人同时出现,容易出错。
建议:优先选择“以座位为中心”的方式,因为你的需求不需要识别具体人,只需要知道哪个座位被占用了。
3. 遮挡处理策略
重点:遮挡是影响准确率的重要因素,需采用鲁棒算法。
常见处理方法:
-
使用多帧信息融合:
- 不仅看当前帧,还要参考前几帧的检测结果,避免因遮挡导致误判。
-
基于时间序列的滤波:
- 如 Kalman Filter 或 Particle Filter,用于预测人是否还在座位上。
-
结合深度信息(如果有):
- 如果使用 RGB-D 相机(如 Intel RealSense),可以利用深度图判断人是否坐在座位上。
-
设定时间阈值:
- 如果一个人连续 N 帧未出现在座位 ROI 内,则认为离开;
- 同理,若连续 N 帧出现在 ROI 内,则认为占用。
4. 工程经验与推荐开源项目
重点:已有成熟方案可借鉴,节省开发时间。
推荐关键词与项目:
-
关键词:
- Person Detection + Object Tracking
- Seat Occupancy Detection
- Fixed Camera Surveillance
- YOLO + OpenCV for Real-time Detection
- Homography Mapping
- Multi-Object Tracking (MOT)
-
开源项目推荐:
✅ 三、代码示例(Python + OpenCV + YOLOv5)
import cv2
import numpy as np
from yolov5 import detect
# 定义座位的 ROI 区域(假设为 6 个座位)
seats_roi = [
[[x1, y1], [x2, y2]], # 座位1的 ROI
[[x1, y1], [x2, y2]], # 座位2的 ROI
...,
]
# 加载 YOLOv5 模型
model = detect.load_model("yolov5s.pt")
def is_in_roi(bbox, roi):
x1, y1, x2, y2 = bbox
rx1, ry1 = roi[0]
rx2, ry2 = roi[1]
return (x1 > rx1 and x2 < rx2 and y1 > ry1 and y2 < ry2)
def update_seat_status(boxes):
seat_occupied = [False] * len(seats_roi)
for box in boxes:
for i, roi in enumerate(seats_roi):
if is_in_roi(box, roi):
seat_occupied[i] = True
break
return seat_occupied
# 主循环
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
results = model(frame)
boxes = results.xyxy[0].cpu().numpy() # 获取检测结果
occupied = update_seat_status(boxes)
# 显示前端界面(伪代码)
for i, status in enumerate(occupied):
color = "green" if status else "gray"
draw_seat(i, color) # 假设函数用于绘制前端界面
cv2.imshow('Frame', frame)
if cv2.waitKey(1) == 27:
break
✅ 四、总结与建议
| 问题 | 解决方案 |
|------|----------|
| 如何映射座位到图像? | 使用 Homography 或 ROI 标定 |
| 座位与人的归属关系? | 以“座位为中心”更稳定 |
| 遮挡处理? | 多帧融合 + 时间滤波 + 阈值判断 |
| 推荐技术栈? | YOLOv5 + OpenCV + DeepSORT |
| 开源项目? | DeepSORT、YOLOv5、MMDetection |
如果你愿意,我可以进一步帮你设计前端界面、数据存储(如 MySQL、Redis)或实时推送(WebSocket)模块。欢迎继续提问!🌟