下午好🌅🌅🌅
本答案参考通义千问
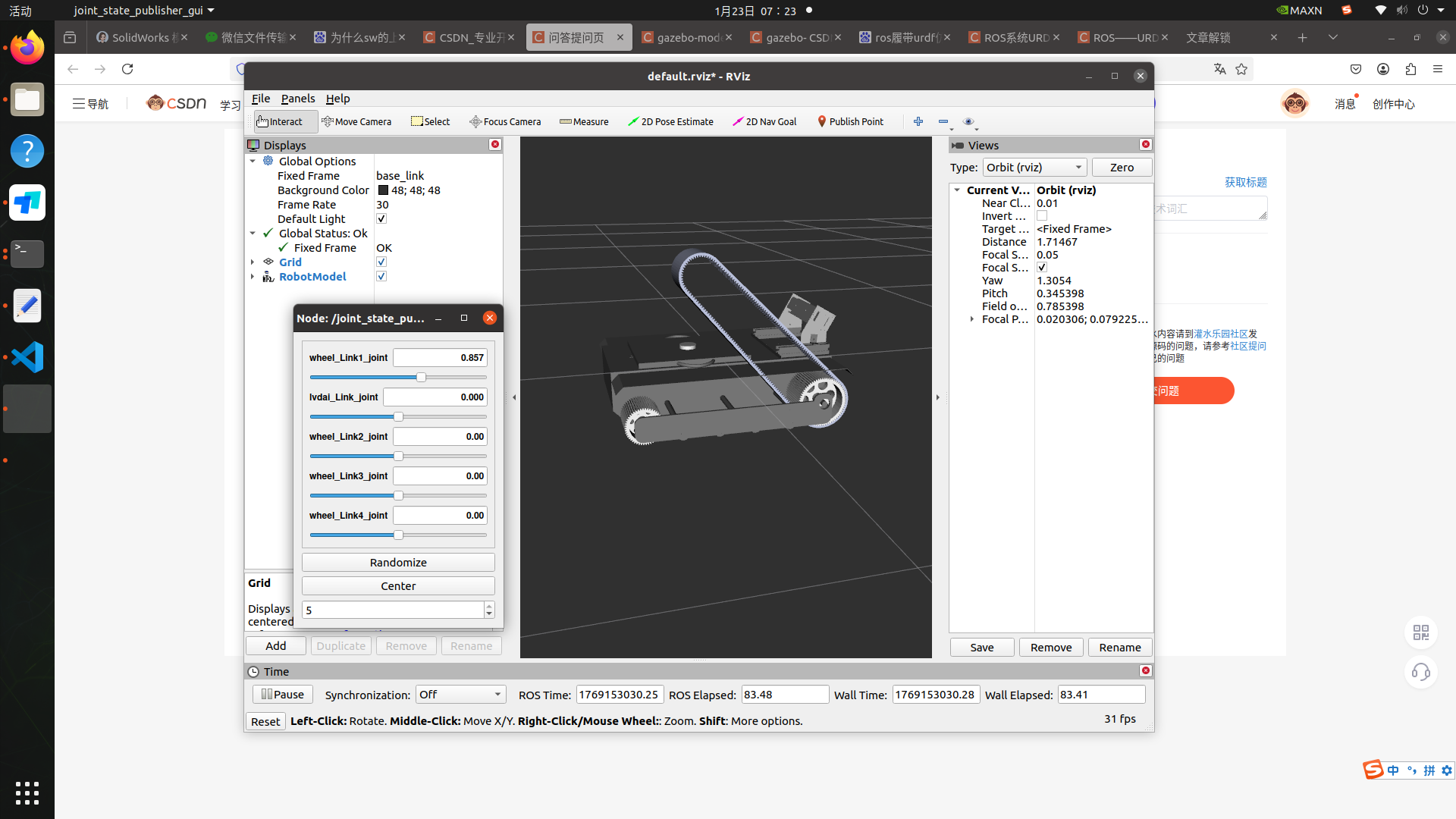
在Gazebo仿真中,履带无法正常运动是一个比较常见的问题,尤其是在使用 sw_urdf_exporter 导出URDF文件时。你提到的RVIZ显示结果可能表明:模型虽然可以加载,但动力学或控制部分未能正确配置。
以下是一些可能导致履带不运动的原因以及对应的解决方案,并附上修改建议和代码示例:
一、可能原因分析
- 缺少有效的驱动器(Actuator)配置
- Gazebo需要知道哪些关节是“受控”的,否则不会施加力。
- 未定义正确的传输接口(Transmission)
- 例如,使用了
EffortJointInterface,但没有设置正确的控制器。
- 未正确配置物理属性(如摩擦、阻尼等)
- 缺少控制节点(Controller)
- 即使有URDF描述,也需要一个ROS控制器来实际驱动关节。
- Gazebo与ROS之间通信问题
- 可能由于话题/服务未正确订阅/发布导致控制信号丢失。
二、解决方案
1. 检查并添加正确的传输接口(Transmission)
你需要为每个履带相关的关节配置一个传输接口,比如 PositionJointInterface 或 VelocityJointInterface,而不是仅仅使用 EffortJointInterface。
修改后的 transmission 配置示例:
<transmission name="wheel_transmission">
<type>hardware_interface/PositionJointInterface</type>
<joint name="wheel_Link1_joint">
<hardware_interface>hardware_interface/PositionJointInterface</hardware_interface>
</joint>
<joint name="wheel_Link2_joint">
<hardware_interface>hardware_interface/PositionJointInterface</hardware_interface>
</joint>
<joint name="wheel_Link3_joint">
<hardware_interface>hardware_interface/PositionJointInterface</hardware_interface>
</joint>
<joint name="wheel_Link4_joint">
<hardware_interface>hardware_interface/PositionJointInterface</hardware_interface>
</joint>
</transmission>
重点说明:
必须为每个需要控制的关节定义 transmission 接口,否则Gazebo不会识别这些关节作为可控制对象。
2. 配置控制器(Controller)
你需要在启动文件中加载一个控制器,例如 joint_state_controller 和 position_controllers。
示例 launch 文件片段:
<launch>
<!-- 加载机器人描述 -->
<param name="robot_description" command="cat $(find your_package)/urdf/your_robot.urdf" />
<!-- 加载关节状态控制器 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 加载位置控制器 -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" args="position_controller" />
</launch>
重点说明:
必须通过控制器对关节施加力或速度,否则即使URDF正确,Gazebo也不会让履带运动。
3. 确保物理参数合理
你的摩擦参数看起来是合理的,但你可以尝试调整以下值:
mu 和 mu2:分别代表主方向和侧向摩擦系数,建议在0.6~1.0之间。damping:适当增加阻尼可以防止无限制加速。max_step_size:如果步长太大,会导致不稳定,建议保持在0.001或更小。
优化后的 physics 配置示例:
<physics type="ode">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
<gravity>0 0 -9.81</gravity>
<ode>
<auto_disable_bodies>false</auto_disable_bodies>
</ode>
</physics>
重点说明:
Gazebo 的物理引擎配置对模拟稳定性至关重要,特别是对于履带这种复杂结构。
4. 检查 RVIZ 显示是否启用控制器
确保你在 RVIZ 中启用了以下插件:
- RobotModel:显示机器人模型。
- Joint State:显示关节状态。
- Interactive Markers:手动控制关节(测试用)。
5. 调试方法建议
- 使用
rostopic list 检查是否有控制话题(如 /joint1_position_controller/command)。 - 使用
rosrun rqt_topic rqt_topic 查看话题数据是否被正确发布。 - 在终端运行
gzclient 和 gzserver 并观察是否有错误日志。
三、总结
| 问题 | 解决方案 |
|------|----------|
| 履带不运动 | 添加正确的 transmission 接口(如 PositionJointInterface) |
| 控制无效 | 添加控制器(如 position_controller) |
| 物理不稳定 | 调整物理参数(如 max_step_size, damping, friction) |
| RVIZ 显示异常 | 检查 RVIZ 插件和话题是否正常 |
四、推荐参考
如果你能提供完整的 URDF 文件或图片,我可以进一步帮你分析具体配置问题。希望以上内容对你有帮助!