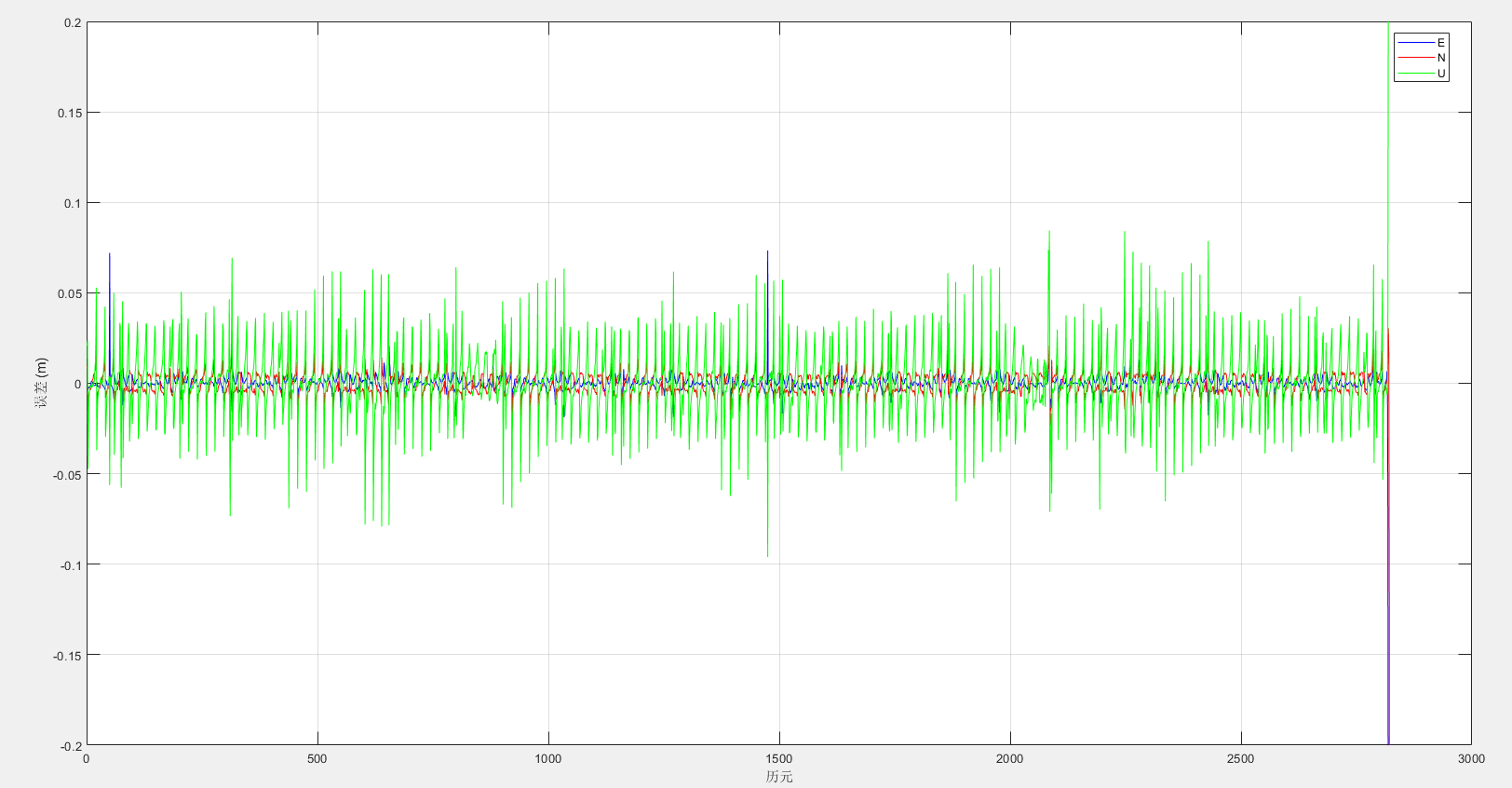
#LEO仿真进行SPP精度出现规律性跳动
这是低轨伪距仿真的代码,各个误差模型按照SPP的设置
obs(1,3)=rho+recclk-satclkCLIGHT+ionalpha(satinfo(2),1)+trop+earthrotat-rel;
SPP定位误差呈现一定的规律性
现在的情况是earthrotat dts rel trop ion这几项用SPP最小二乘最后一次迭代算出来的参数和仿真用的相差很小,基本一样,卫星位置也基本一样(相差几毫米),但是有的历元求出来的rho(卫地距)和仿真对应的值差2个厘米,导致被接收机钟差吸收,接收机钟差变成2个厘米,实际仿真是0,我的理解是最小二乘没有收敛到最佳位置就停止迭代了
这是SPP最小二乘最后一次迭代
3 2017/09/01 00:00:59.989848 sat= 196 rs= -1024155.572 4879810.596 5989521.081 dts= 299.452 var= 0.000 svh=00
3 2017/09/01 00:00:59.993886 sat= 197 rs= -2711679.698 6742377.522 2826729.764 dts= 299.381 var= 0.000 svh=00
3 2017/09/01 00:00:59.990331 sat= 208 rs= -4880105.772 4304199.807 4293277.416 dts= 299.385 var= 0.000 svh=00
3 2017/09/01 00:00:59.991627 sat= 262 rs= -571562.786 6385367.875 4435197.547 dts= 300.197 var= 0.000 svh=00
3 2017/09/01 00:00:59.993686 sat= 273 rs= -3786293.836 6127229.058 2986807.327 dts= 300.206 var= 0.000 svh=00
3 2017/09/01 00:00:59.988841 sat= 274 rs= -3258054.314 3601340.521 6094964.371 dts= 300.125 var= 0.000 svh=00
3 sat=196 azel=338.1 16.4 res= 0.002 P= 3043362.560 r+earthrotat= 3043649.751 r= 3043648.292 earthrotat= 1.459 dtr= -0.023 dts= 299.452 trop= 8.521 ion= 3.761 sig=1.899 varer=0.40851 vare= 0.000 vmeas= 0.090 vion=3.107 vtrp=0.090
3 sat=197 azel=194.9 45.9 res= -0.002 P= 1832868.627 r+earthrotat= 1833162.241 r= 1833161.803 earthrotat= 0.438 dtr= -0.023 dts= 299.381 trop= 3.351 ion= 2.440 sig=1.270 varer=0.21528 vare= 0.000 vmeas= 0.090 vion=1.308 vtrp=0.090
3 sat=208 azel= 75.2 18.6 res= 0.003 P= 2898769.459 r+earthrotat= 2899056.850 r= 2899060.404 earthrotat= -3.554 dtr= -0.023 dts= 299.385 trop= 7.550 ion= 4.464 sig=2.200 varer=0.37221 vare= 0.000 vmeas= 0.090 vion=4.377 vtrp=0.090
3 sat=262 azel=289.9 25.7 res= 0.001 P= 2510019.125 r+earthrotat= 2510310.714 r= 2510307.869 earthrotat= 2.845 dtr= -0.023 dts= 300.197 trop= 5.548 ion= 3.083 sig=1.573 varer=0.29737 vare= 0.000 vmeas= 0.090 vion=2.088 vtrp=0.090
3 sat=273 azel=138.9 43.4 res= 0.001 P= 1892789.127 r+earthrotat= 1893083.140 r= 1893084.351 earthrotat= -1.211 dtr= -0.023 dts= 300.206 trop= 3.507 ion= 2.708 sig=1.386 varer=0.22109 vare= 0.000 vmeas= 0.090 vion=1.610 vtrp=0.090
3 sat=274 azel= 26.8 12.2 res= -0.006 P= 3345316.592 r+earthrotat= 3345601.264 r= 3345603.233 earthrotat= -1.969 dtr= -0.023 dts= 300.125 trop= 11.360 ion= 4.122 sig=2.083 varer=0.51464 vare= 0.000 vmeas= 0.090 vion=3.733 vtrp=0.090
这是仿真
2017/09/01 00:01:00.00000
L28 P=3043362.560 rho+earthrotat=3043649.730 rho=3043648.271 earthrotat= 1.459 dtr= 0.000 dts= 299.452 trop= 8.520 ion= 3.761 rs= -1024155.570 4879810.593 5989521.086
L29 P=1832868.627 rho+earthrotat=1833162.214 rho=1833161.776 earthrotat= 0.438 dtr= 0.000 dts= 299.380 trop= 3.351 ion= 2.441 rs= -2711679.696 6742377.520 2826729.771
L40 P=2898769.459 rho+earthrotat=2899056.827 rho=2899060.381 earthrotat= -3.554 dtr= 0.000 dts= 299.385 trop= 7.550 ion= 4.466 rs= -4880105.768 4304199.805 4293277.422
L94 P=2510019.125 rho+earthrotat=2510310.692 rho=2510307.847 earthrotat= 2.845 dtr= 0.000 dts= 300.197 trop= 5.547 ion= 3.083 rs= -571562.786 6385367.879 4435197.541
M05 P=1892789.127 rho+earthrotat=1893083.117 rho=1893084.328 earthrotat= -1.211 dtr= 0.000 dts= 300.206 trop= 3.507 ion= 2.709 rs= -3786293.836 6127229.061 2986807.321
M06 P=3345316.592 rho+earthrotat=3345601.234 rho=3345603.203 earthrotat= -1.969 dtr= 0.000 dts= 300.125 trop= 11.360 ion= 4.123 rs= -3258054.317 3601340.527 6094964.368