下午好🌅🌅🌅
本答案参考通义千问
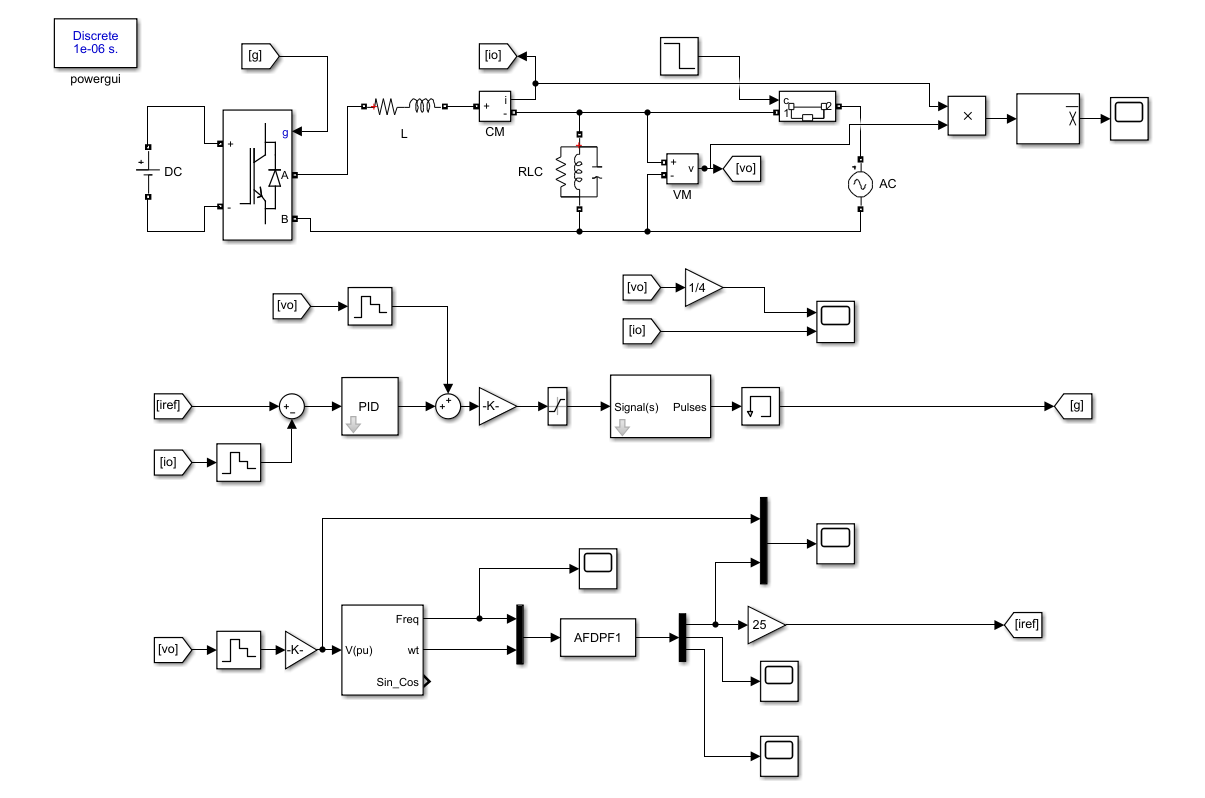
在 Simulink 中实现 逆变器输出的无功功率检测与调节,是孤岛保护系统设计中的关键环节。这通常涉及以下几个步骤:
一、问题分析
要实现对逆变器输出的 无功功率(Q) 的检测和调节,需要以下几点:
- 电压与电流信号采集:获取逆变器输出端的电压和电流信号。
- 无功功率计算:通过电压和电流的相位差来计算无功功率。
- 控制策略设计:根据无功功率的变化调整逆变器的输出,例如通过改变参考电压或电流的相位角。
- 仿真模型搭建:在 Simulink 中构建包含这些功能的仿真模型。
二、解决方案
1. 采集电压和电流信号
- 在 Simulink 中使用 Voltage Sensor 和 Current Sensor 模块,分别采集逆变器输出的 电压(V) 和 电流(I)。
- 确保采样频率足够高,以保证精度。
2. 无功功率计算
无功功率公式为:
$$
Q = V \cdot I \cdot \sin(\theta)
$$
其中:
- $ V $ 是电压幅值;
- $ I $ 是电流幅值;
- $ \theta $ 是电压和电流之间的相位角。
Simulink 实现方式:
- 使用 Phase Angle Measurement 模块获取电压与电流的相位差。
- 使用 Sine Function 计算 $ \sin(\theta) $。
- 用 Multiply 模块进行乘法运算,得到无功功率 Q。
注意: 也可以使用 Power System Blockset 中的 Power Measurement 模块直接获取有功和无功功率。
3. 无功功率调节
- 常见的调节方法包括:
- PI 控制器:根据无功功率偏差调整参考电压或电流的相位角。
- V/Q 控制:将无功功率作为反馈量,调整逆变器输出的参考电压。
Simulink 实现方式:
- 使用 PID Controller 模块,输入为无功功率误差(目标值 - 实际值),输出为参考电压或电流的相位角。
- 将该控制信号接入 PWM 生成模块 或 Inverter Control 模块,实现无功功率调节。
4. 仿真模型搭建
- 构建一个包含以下模块的模型:
- 逆变器(如 Voltage Source Inverter)
- 负载(如 RL 负载或非线性负载)
- 电压/电流传感器
- 无功功率计算模块
- PI 控制器
- PWM 控制模块
- 孤岛检测模块(如频率变化、电压变化等)
三、代码示例(MATLAB/Simulink)
1. 无功功率计算模块(MATLAB Function Block)
function Q = calcReactivePower(V, I, theta)
% V: 电压幅值
% I: 电流幅值
% theta: 相位角(弧度)
Q = V * I * sin(theta);
end
2. PI 控制器设置(Simulink PID Controller Block)
- 设置参数如下:
- Kp: 0.5
- Ki: 0.1
- Kd: 0
- Sample Time: 0.0001 (根据系统采样率设定)
3. PWM 控制模块(使用 Pulse Generator 或 PWM Generator 模块)
- 根据控制器输出的参考相位角,生成相应的 PWM 信号,控制逆变器开关器件。
四、总结
以下是实现逆变器输出无功功率检测与调节的 关键步骤:
- 采集电压和电流信号,用于后续计算。
- 计算无功功率,可使用 MATLAB Function 或 Power System Blockset。
- 设计控制策略,如 PI 控制器,根据无功功率偏差调整参考信号。
- 构建完整仿真模型,集成所有模块并验证性能。
五、注意事项
- 仿真中应考虑 采样率 和 滤波器设计,避免噪声干扰。
- 无功功率调节需与 有功功率控制 协调,防止系统不稳定。
- 可结合 孤岛检测算法(如频率偏移、电压变化率等)提升系统安全性。
如果你需要我提供具体的 Simulink 模型文件(.slx) 或 MATLAB 代码片段,可以告诉我你使用的 Simulink 版本和相关模块名称,我可以进一步帮助你完善模型。

 分享
分享
 系统已结题
3月30日
系统已结题
3月30日 已采纳回答
3月22日
已采纳回答
3月22日


