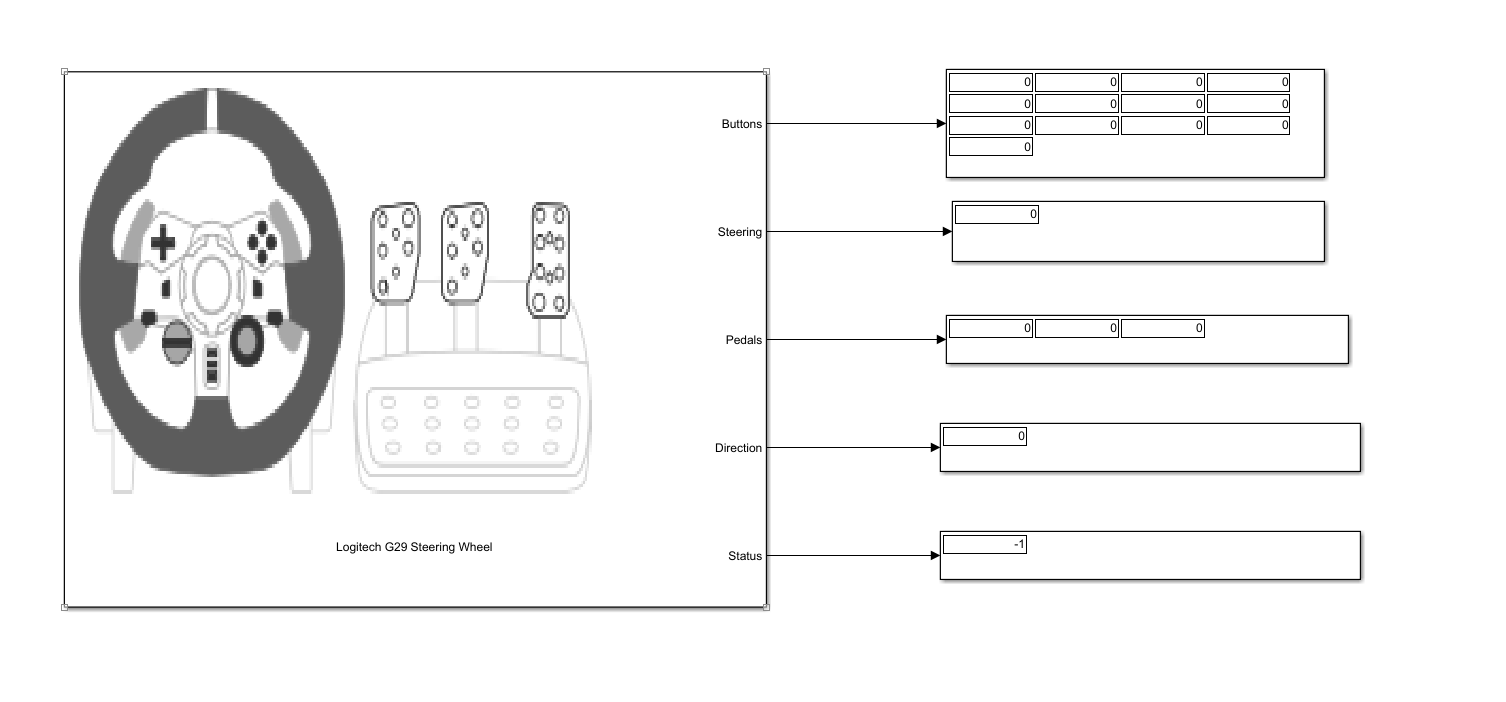
罗技G29连simulink时使用Steering Wheel Read,用SpeedGoat实时机去做仿真,Steering Wheel Read模块的Status一直是-1,然后无论怎么转方向盘,以及换挡,都不显示数据。

罗技G29连simulink时使用Steering Wheel Read,用SpeedGoat实时机去做仿真,Steering Wheel Read模块的Status一直是-1,然后无论怎么转方向盘,以及换挡,都不显示数据。
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
你遇到的问题是:在使用罗技G29方向盘连接Simulink,并通过SpeedGoat实时机进行仿真时,Steering Wheel Read模块的Status始终为-1,且方向盘和换挡操作没有数据输出。
这表明Simulink无法正确识别或通信罗技G29方向盘设备。以下是你需要排查和解决的详细步骤。
Steering Wheel Read模块依赖于Windows的DirectInput或XInput驱动。Steering Wheel Read模块可能未正确配置,导致无法读取设备状态。加粗重点:确保设备在Windows中能正常工作,这是Simulink能够识别的基础条件。
Steering Wheel Read模块依赖于Windows DirectInput接口。Steering Wheel Read模块。Logitech G29 Driving Force 或类似名称。Steering Wheel, Throttle, Brake 等。Shift Up, Shift Down, Handbrake 等。加粗重点:确保模块的参数与实际方向盘功能匹配。
如果Simulink内置模块仍然无法识别,可以考虑使用MATLAB脚本或C/C++代码直接读取方向盘数据,再将数据传入Simulink。
% 使用Windows API读取DirectInput设备
% 注意:需要管理员权限运行
% 定义结构体
typeinfo = winstruct('DIDEVICEOBJECTDATA', ...
'dwOfs', 'uint32', ...
'dwData', 'uint32', ...
'dwTime', 'uint32', ...
'dwType', 'uint32', ...
'dwFlags', 'uint32');
% 初始化DirectInput
di = comobj('DirectInput.DirectInput');
device = di.CreateDevice('{F85A006D-B7B9-42A5-9B8E-D5DBA97246C4}'); % G29的GUID
device.SetDataFormat(winstruct('c_dfDIKeyboard'));
device.Acquire();
% 读取输入
while true
data = device.Poll();
if ~isempty(data)
for i=1:length(data)
obj = data(i);
if obj.dwOfs == 0x00000000 % Steering wheel
steer = obj.dwData;
disp(['Steering: ', num2str(steer)]);
end
end
end
pause(0.01);
end
加粗重点:如果Simulink模块不稳定,可以使用MATLAB直接读取设备数据并传递给Simulink模型。
Simulink Real-Time库)。| 步骤 | 内容 |
|------|------|
| 1 | 检查设备是否被系统识别 |
| 2 | 更新或重装Simulink驱动 |
| 3 | 检查Steering Wheel Read模块参数 |
| 4 | 使用MATLAB代码直接读取设备 |
| 5 | 检查SpeedGoat配置 |
| 6 | 考虑使用第三方工具 |
如果你能提供具体的Simulink版本和操作系统信息,我可以进一步帮助你定位问题。希望以上方法能解决你的问题!
分享 创建了问题
3月17日
创建了问题
3月17日

