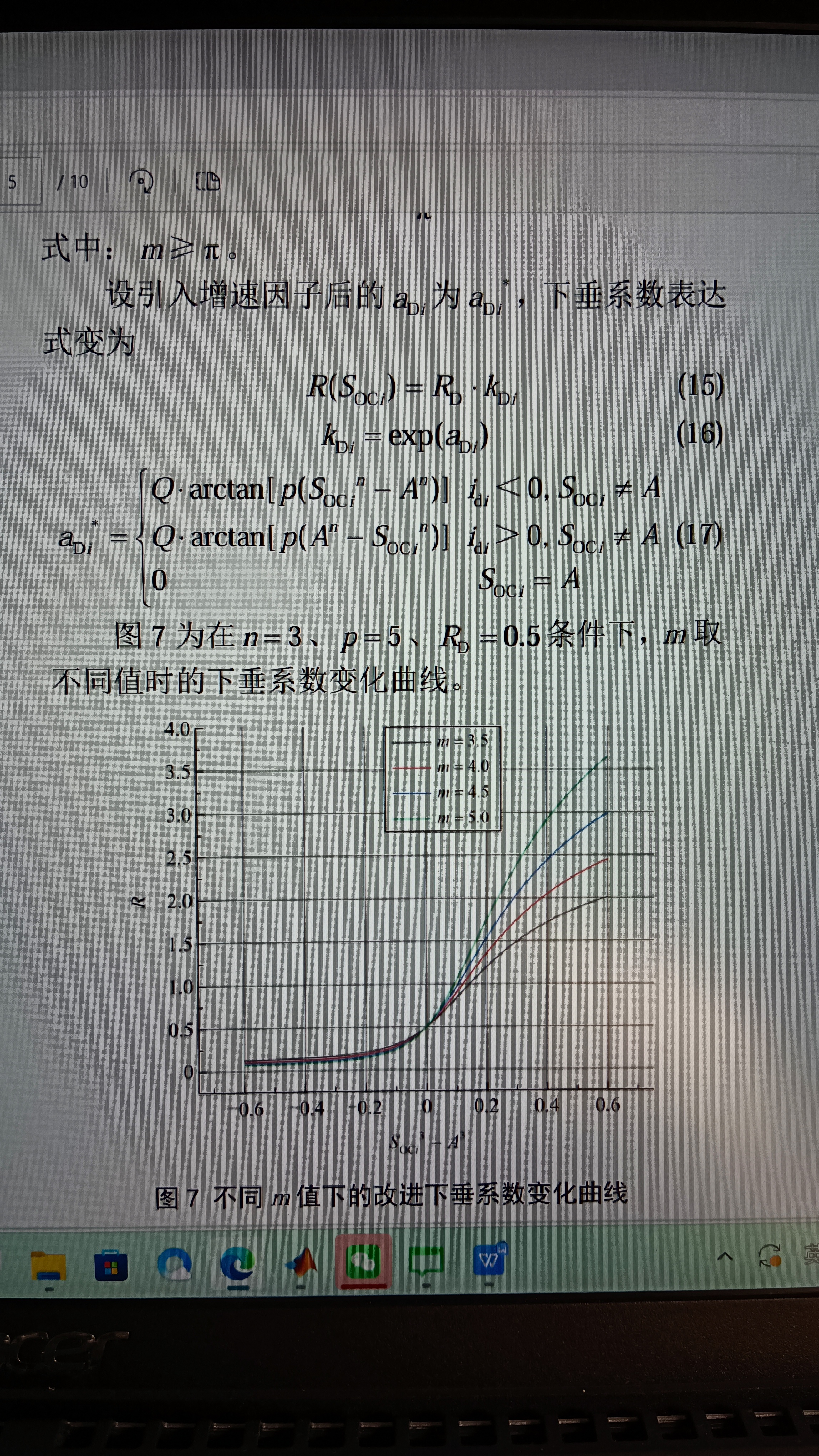
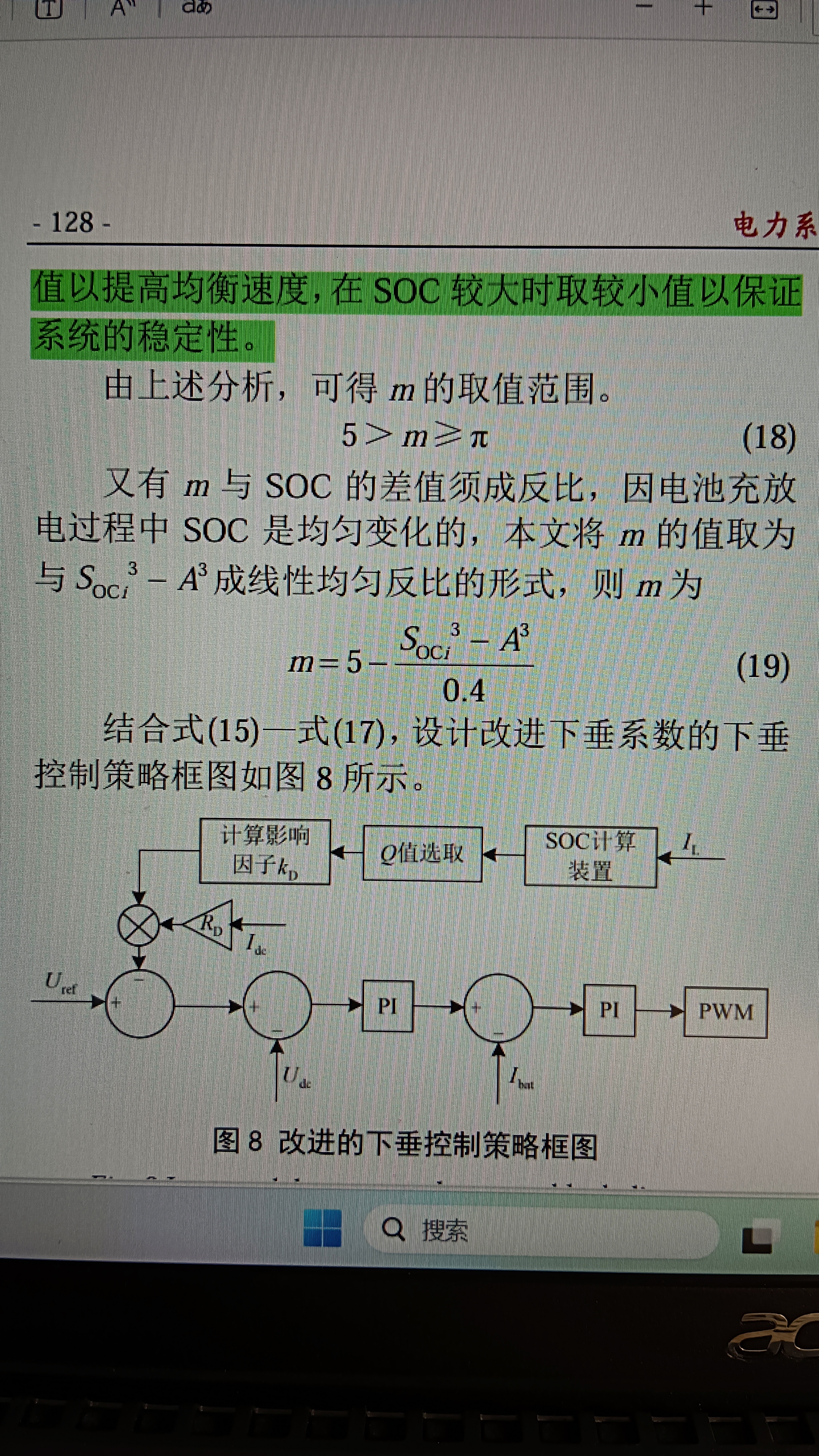
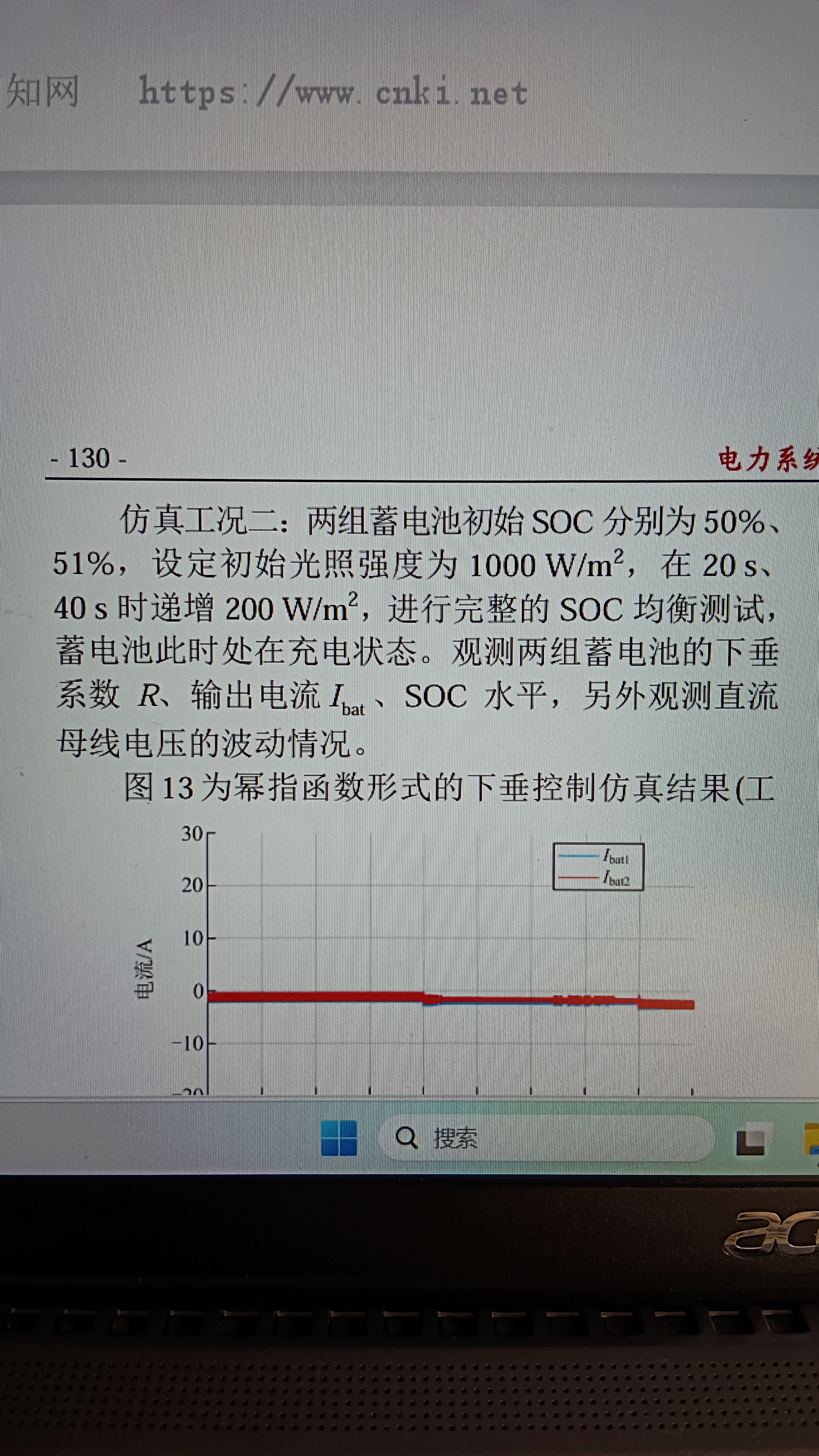
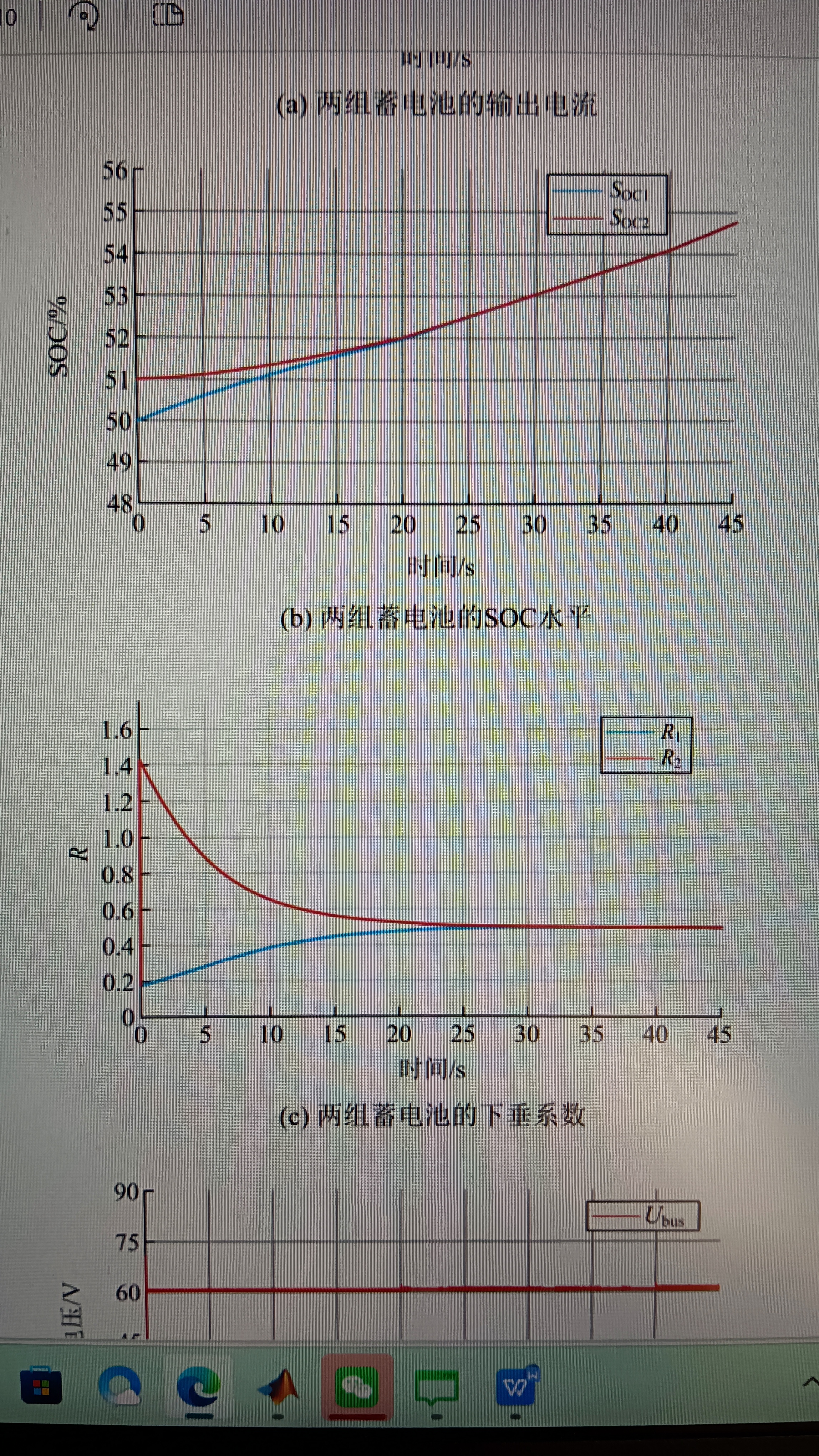
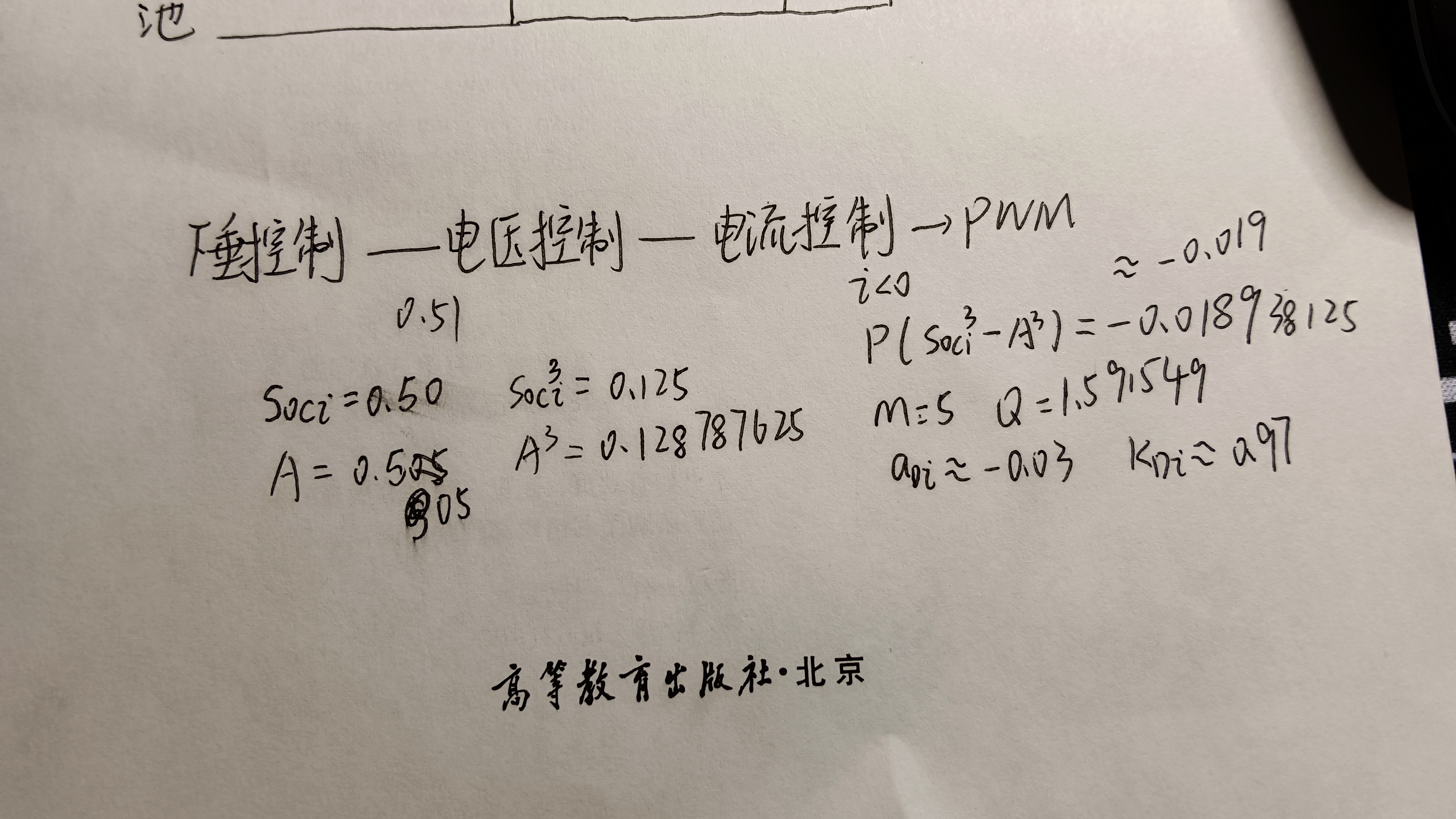
p1p2公式,在p3初始soc分别为50% 51%的情况,下垂系数我计算和仿真出来都在0.5附近,差别很小,绝不会是p4的1.2与0.4附近,p5是我的计算过程,还差均衡过程

p1p2公式,在p3初始soc分别为50% 51%的情况,下垂系数我计算和仿真出来都在0.5附近,差别很小,绝不会是p4的1.2与0.4附近,p5是我的计算过程,还差均衡过程
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
根据你的描述,你正在研究下垂控制(Droop Control)与SOC均衡的仿真问题,特别是在p1、p2、p3、p4、p5这些节点之间的功率分配和SOC平衡。你提到在p3节点初始SOC为50%和51%的情况下,下垂系数计算值与仿真结果均在0.5附近,而p4节点的下垂系数应为1.2或0.4左右,但实际仿真中并未出现这种差异。此外,你还提到p5是你的计算过程,还差均衡过程。
下面我将从以下几个方面详细分析并提供解决方案:
下垂控制是一种用于多源系统(如微电网、储能系统)中实现功率分配的控制策略,其核心思想是通过调整电压或频率来分配负载,使得各电源按比例承担负荷。
对于电压下垂控制,常用公式如下:
$$ V = V_0 - K_p \cdot P $$
其中:
在SOC均衡中,通常会结合下垂控制与SOC进行动态调节,以保证各储能单元的SOC趋于一致。
这说明你在这些节点上设置的下垂系数可能为0.5,或者由于某些原因导致仿真中自动调整到该值。
这表明你希望在p4节点使用不同的下垂系数,以实现更精细的功率分配或SOC均衡。
这说明你已经完成了部分计算,但尚未完成SOC均衡逻辑的实现。
重点:确保每个节点的下垂系数是独立配置的。
如果你在代码中使用了统一的下垂系数,那么所有节点都会表现出相似的行为。请检查以下内容:
示例代码片段(伪代码):
# 假设每个节点都有自己的下垂系数
k_p1 = 0.5
k_p2 = 0.5
k_p3 = 0.5
k_p4 = 1.2 # 你希望的值
k_p5 = 0.4 # 你希望的值
如果这些参数没有被正确应用,那么仿真结果就不会体现预期差异。
重点:SOC均衡需要结合下垂控制与SOC反馈。
你可以采用以下方式实现SOC均衡:
示例算法(伪代码):
# 计算SOC偏差
soc_diff = soc_current - soc_target
# 动态调整下垂系数
if soc_diff > 0:
k_p = k_p_initial * (1 + alpha * soc_diff) # 如果SOC高,降低下垂系数
else:
k_p = k_p_initial * (1 - beta * abs(soc_diff)) # 如果SOC低,提高下垂系数
其中 alpha 和 beta 是调整因子,可以根据实验调整。
重点:建议使用仿真工具验证下垂系数对SOC的影响。
重点:SOC均衡可以结合PI控制器或自适应算法。
例如:
示例代码(Python):
from scipy.integrate import odeint
import numpy as np
def soc_balance_model(state, t, k_p, soc_target):
soc1, soc2 = state
# 计算SOC偏差
error = soc1 - soc2
# 动态调整下垂系数
k_p1 = k_p * (1 + 0.1 * error)
k_p2 = k_p * (1 - 0.1 * error)
# 简化模型:假设功率与SOC成反比
d_soc1_dt = -k_p1 * (soc1 - soc_target)
d_soc2_dt = -k_p2 * (soc2 - soc_target)
return [d_soc1_dt, d_soc2_dt]
# 初始SOC
initial_soc = [0.5, 0.51]
t = np.linspace(0, 100, 1000)
solution = odeint(soc_balance_model, initial_soc, t, args=(0.5, 0.5))
# 可视化SOC变化
import matplotlib.pyplot as plt
plt.plot(t, solution[:, 0], label='SOC1')
plt.plot(t, solution[:, 1], label='SOC2')
plt.legend()
plt.show()
如果你愿意提供具体的代码或仿真模型,我可以进一步帮助你定位问题并优化SOC均衡逻辑。
分享 创建了问题
3月18日
创建了问题
3月18日

