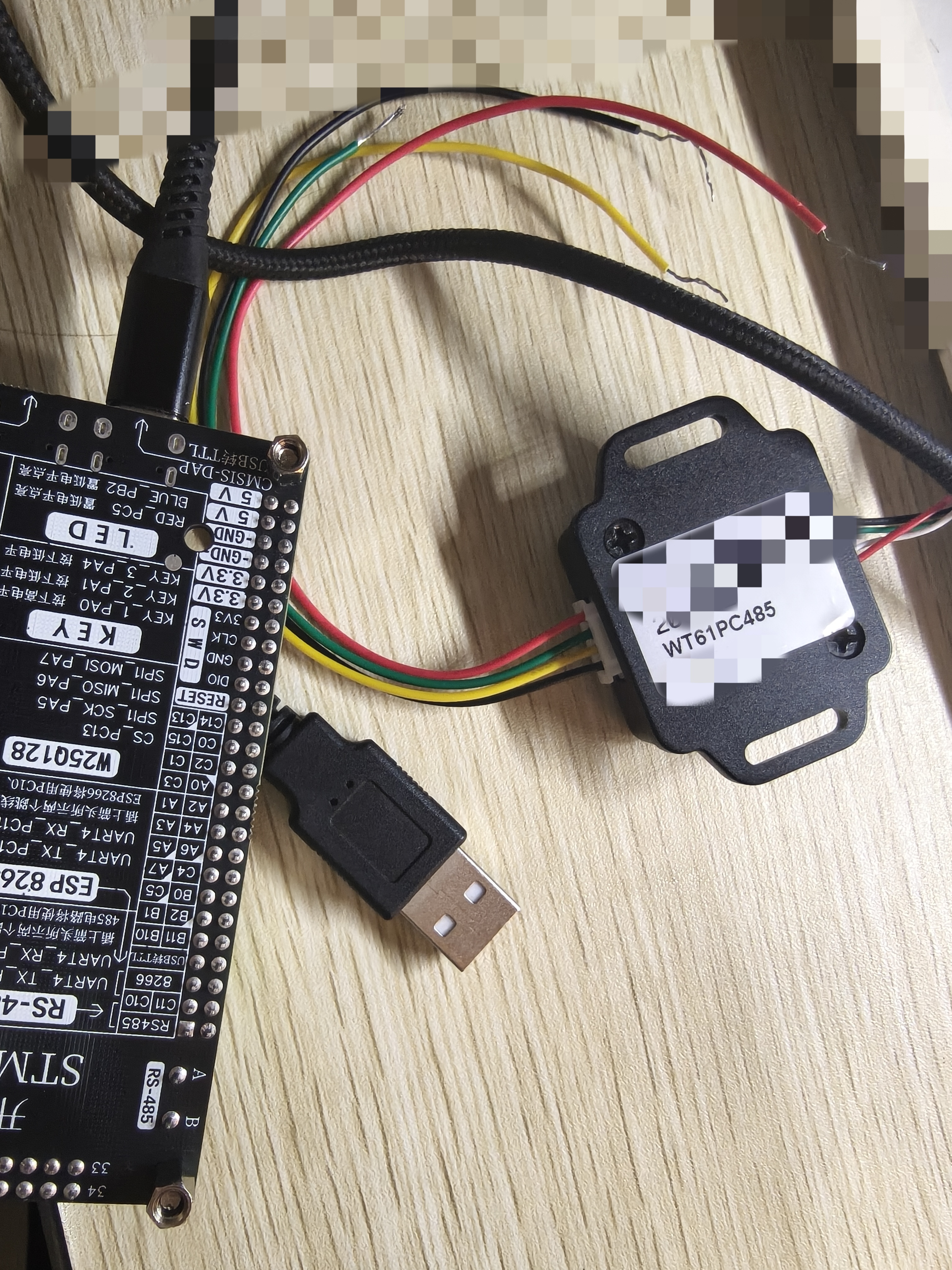
怎么让这两个相连,是不是要买max485转换,直接连怎么连接。麻烦具体一点,不太懂,详细一点,谢谢

怎么让这两个相连,是不是要买max485转换,直接连怎么连接。麻烦具体一点,不太懂,详细一点,谢谢
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
要让 WT61PC468(一种蓝牙模块)和 STM32F103RCT6(一款常用的ARM Cortex-M3单片机)进行通信,需要根据两者之间的通信协议来决定连接方式。以下是详细步骤和解决方案。
MAX485 是用于 RS485 通信 的电平转换芯片,适用于工业现场总线通信,不适用于 UART 通信。
如果你是通过 UART 接口 与 WT61PC468 通信,那么直接使用 TTL 电平的 UART 信号 即可,不需要 MAX485。
| WT61PC468 引脚 | STM32F103RCT6 引脚 | 功能说明 | |----------------|---------------------|----------| | TXD | PA9(USART1_TX) | 发送数据 | | RXD | PA10(USART1_RX) | 接收数据 | | GND | GND | 公共地 | | VCC | 3.3V 或 5V | 电源输入 |
⚠️ 注意:WT61PC468 的工作电压为 3.3V 或 5V,请确保 STM32 的 I/O 引脚电压匹配(STM32 的 IO 电压一般为 3.3V)。如果 WT61PC468 使用 5V,建议在连接前加一个 电平转换器(如 74HC245)。
// 引入头文件
#include "stm32f1xx_hal.h"
// 定义串口句柄
UART_HandleTypeDef huart1;
// 初始化函数
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600; // 波特率设置
huart1.Init.WordLength = UART_WORDLENGTH_8B; // 数据位
huart1.Init.StopBits = UART_STOPBITS_1; // 停止位
huart1.Init.Parity = UART_PARITY_NONE; // 校验位
huart1.Init.Mode = UART_MODE_TX_RX; // 收发模式
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; // 硬件流控制关闭
HAL_UART_Init(&huart1);
}
void SendData(uint8_t *data, uint16_t len)
{
HAL_UART_Transmit(&huart1, data, len, HAL_MAX_DELAY);
}
uint8_t rx_buffer[128];
uint8_t rx_index = 0;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1) {
if (rx_index < sizeof(rx_buffer)) {
rx_buffer[rx_index++] = rx_data;
HAL_UART_Receive_IT(&huart1, &rx_data, 1); // 继续接收
} else {
rx_index = 0; // 溢出处理
}
}
}
HAL_UART_Receive_IT()。| 工具 | 用途 | |------|------| | STM32CubeMX | 生成初始化代码 | | Keil uVision | 编译和调试 STM32 项目 | | XCOM / Putty | 串口调试工具 | | Arduino IDE(可选) | 快速测试串口通信 |
如有需要,我可以提供完整的 STM32 项目工程文件(基于 HAL 库)和 WT61PC468 的蓝牙指令集。欢迎继续提问!
分享 修改了问题
3月20日
修改了问题
3月19日
创建了问题
3月19日
修改了问题
3月20日
修改了问题
3月19日
创建了问题
3月19日


