
我们小车用的芯片是stc32g144k246,使用的是学习板
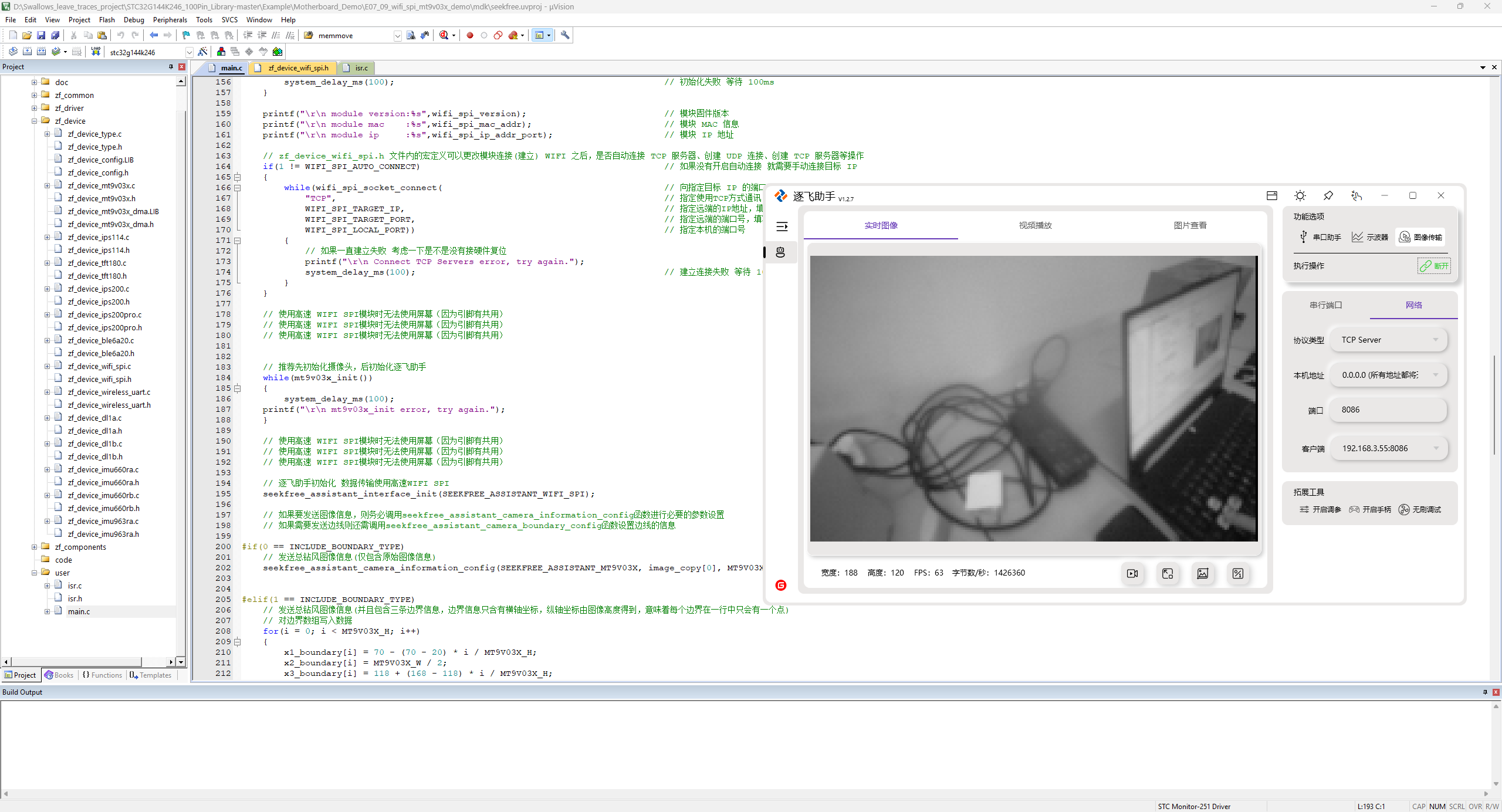
使用逐飞的例程库传输的图像是完整的,下面是逐飞例程库的main.c的代码
/*********************************************************************************************************************
* STC32G Opensourec Library 即(STC32G 开源库)是一个基于官方 SDK 接口的第三方开源库
* Copyright (c) 2025 SEEKFREE 逐飞科技
*
* 本文件是STC32G144K开源库的一部分
*
* STC32G 开源库 是免费软件
* 您可以根据自由软件基金会发布的 GPL(GNU General Public License,即 GNU通用公共许可证)的条款
* 即 GPL 的第3版(即 GPL3.0)或(您选择的)任何后来的版本,重新发布和/或修改它
*
* 本开源库的发布是希望它能发挥作用,但并未对其作任何的保证
* 甚至没有隐含的适销性或适合特定用途的保证
* 更多细节请参见 GPL
*
* 您应该在收到本开源库的同时收到一份 GPL 的副本
* 如果没有,请参阅<https://www.gnu.org/licenses/>
*
* 额外注明:
* 本开源库使用 GPL3.0 开源许可证协议 以上许可申明为译文版本
* 许可申明英文版在 libraries/doc 文件夹下的 GPL3_permission_statement.txt 文件中
* 许可证副本在 libraries 文件夹下 即该文件夹下的 LICENSE 文件
* 欢迎各位使用并传播本程序 但修改内容时必须保留逐飞科技的版权声明(即本声明)
*
* 文件名称
* 公司名称 成都逐飞科技有限公司
* 版本信息 查看 libraries/doc 文件夹内 version 文件 版本说明
* 开发环境 MDK FOR C251
* 适用平台 STC32G144K
* 店铺链接 https://seekfree.taobao.com/
*
* 修改记录
* 日期 作者 备注
* 2024-08-01 大W first version
********************************************************************************************************************/
#include "zf_common_headfile.h"
// *************************** 例程硬件连接说明 ***************************
// 使用 type-c 连接核心板
// 直接将下载器正确连接在核心板的调试下载接口即可
//
// 接入 高速Wifi SPI 模块
// 模块管脚 单片机管脚
// RST 查看 zf_device_wifi_spi.h 中 WIFI_SPI_RST_PIN 宏定义
// INT 查看 zf_device_wifi_spi.h 中 WIFI_SPI_INT_PIN 宏定义
// CS 查看 zf_device_wifi_spi.h 中 WIFI_SPI_CS_PIN 宏定义
// MISO 查看 zf_device_wifi_spi.h 中 WIFI_SPI_MISO_PIN 宏定义
// SCK 查看 zf_device_wifi_spi.h 中 WIFI_SPI_SCK_PIN 宏定义
// MOSI 查看 zf_device_wifi_spi.h 中 WIFI_SPI_MOSI_PIN 宏定义
// 5V 5V 电源
// GND 电源地
//
// 接入 总钻风摄像头
// 模块管脚 单片机管脚
// TXD 查看 zf_device_mt9v03x.h 中 MT9V03X_COF_UART_TX 宏定义
// RXD 查看 zf_device_mt9v03x.h 中 MT9V03X_COF_UART_RX 宏定义
// D0 查看 zf_device_mt9v03x.h 中 MT9V03X_D0_PIN 宏定义
// D1 查看 zf_device_mt9v03x.h 中 MT9V03X_D1_PIN 宏定义
// D2 查看 zf_device_mt9v03x.h 中 MT9V03X_D2_PIN 宏定义
// D3 查看 zf_device_mt9v03x.h 中 MT9V03X_D3_PIN 宏定义
// D4 查看 zf_device_mt9v03x.h 中 MT9V03X_D4_PIN 宏定义
// D5 查看 zf_device_mt9v03x.h 中 MT9V03X_D5_PIN 宏定义
// D6 查看 zf_device_mt9v03x.h 中 MT9V03X_D6_PIN 宏定义
// D7 查看 zf_device_mt9v03x.h 中 MT9V03X_D7_PIN 宏定义
// PCLK 查看 zf_device_mt9v03x.h 中 MT9V03X_PCLK_PIN 宏定义
// VSYNC 查看 zf_device_mt9v03x.h 中 MT9V03X_VSY_PIN 宏定义
// HSYNC 查看 zf_device_mt9v03x.h 中 MT9V03X_HERF_PIN 宏定义
// ------------------------------------
//
// *************************** 例程使用步骤说明 ***************************
// 1.根据硬件连接说明连接好模块,使用电源供电(下载器供电会导致模块电压不足)
//
// 2.查看电脑所连接的wifi,记录wifi名称,密码,IP地址
//
// 3.在下方的代码区域中修改宏定义,WIFI_SSID_TEST为wifi名称,WIFI_PASSWORD_TEST为wifi密码
//
// 4.打开zf_device_wifi_spi.h,修改WIFI_SPI_TARGET_IP宏定义,设置为电脑wifi的IP地址
//
// 5.下载例程到单片机中,打开串口助手,打开下载器的串口
//
// 6.打开逐飞科技的逐飞助手软件,选择图像传输功能
//
// 7.选择网络,设置为TCP Server,本机地址中选择WIFI网络然后点击链接
// *************************** 例程测试说明 ***************************
// 1.本例程会通过 Debug 串口输出测试信息 请务必接好调试串口以便获取测试信息
//
// 2.连接好模块和核心板后(尽量使用配套主板测试以避免供电不足的问题) 烧录本例程 按下复位后程序开始运行
//
// 3.如果模块未能正常初始化 会通过 DEBUG 串口输出未能成功初始化的原因 随后程序会尝试重新初始化 一般情况下重试会成功
//
// 4.如果一直在 Debug 串口输出报错 就需要检查报错内容 并查看本文件下方的常见问题列表进行排查
//
// 5.程序默认不开启 WIFI_SPI_AUTO_CONNECT 宏定义 通过 main 函数中的接口建立网络链接 如果需要固定自行建立链接 可以开启该宏定义
//
// 6.当模块初始化完成后会通过 DEBUG 串口输出当前模块的主要信息:固件版本、IP信息、MAC信息、PORT信息
//
// 7.本例程是 TCP Client 例程 模块会被配置为 TCP Client 需要连接到局域网内的 TCP Server 才能进行通信
// 目标连接的 TCP Server 的 IP 与端口默认使用 zf_device_wifi_spi.h 中 WIFI_SPI_TARGET_IP 与 WIFI_SPI_TARGET_PORT 定义
// 实际测试需要根据现场 TCP Server 的实际 IP 地址与端口设置
//
// 8.当本机设备主动连接到 TCP Server (例如电脑使用逐飞助手上位机进入 TCP Server 模式 然后本机连接到电脑的 IP 与端口)
// 本例程会采集总钻风图像并发送到逐飞助手上位机
//
// 9.默认情况下逐飞助手显示摄像头的图像帧率可以达到50帧,如果无线网络比较复杂例如附近有较多的WIFI热点,可能会导致显示帧率较低
//
//
// 如果发现现象与说明严重不符 请参照本文件最下方 例程常见问题说明 进行排查
// **************************** 代码区域 ****************************
//0:不包含边界信息
//1:包含三条边线信息,边线信息只包含横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点
//2:包含三条边线信息,边界信息只含有纵轴坐标,横轴坐标由图像宽度得到,意味着每个边界在一列中只会有一个点,一般来说很少有这样的使用需求
//3:包含三条边线信息,边界信息含有横纵轴坐标,意味着你可以指定每个点的横纵坐标,边线的数量也可以大于或者小于图像的高度,通常来说边线数量大于图像的高度,一般是搜线算法能找出回弯的情况
//4:没有图像信息,仅包含三条边线信息,边线信息只包含横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点,这样的方式可以极大的降低传输的数据量
#define INCLUDE_BOUNDARY_TYPE 0
#define WIFI_SSID_TEST "SmartCar-108"
#define WIFI_PASSWORD_TEST "Smartcar108!" // 如果需要连接的WIFI 没有密码则需要将 这里 替换为 NULL
// 边界的点数量远大于图像高度,便于保存回弯的情况
#define BOUNDARY_NUM (MT9V03X_H * 3 / 2)
// 只有X边界
uint8 xy_x1_boundary[BOUNDARY_NUM], xy_x2_boundary[BOUNDARY_NUM], xy_x3_boundary[BOUNDARY_NUM];
// 只有Y边界
uint8 xy_y1_boundary[BOUNDARY_NUM], xy_y2_boundary[BOUNDARY_NUM], xy_y3_boundary[BOUNDARY_NUM];
// X Y边界都是单独指定的
uint8 x1_boundary[MT9V03X_H], x2_boundary[MT9V03X_H], x3_boundary[MT9V03X_H];
uint8 y1_boundary[MT9V03X_W], y2_boundary[MT9V03X_W], y3_boundary[MT9V03X_W];
// 图像备份数组,在发送前将图像备份再进行发送,这样可以避免图像出现撕裂的问题
uint8 far image_copy[MT9V03X_H][MT9V03X_W];
void main (void)
{
#if(1 == INCLUDE_BOUNDARY_TYPE || 2 == INCLUDE_BOUNDARY_TYPE || 4 == INCLUDE_BOUNDARY_TYPE)
int32 i = 0;
#elif(3 == INCLUDE_BOUNDARY_TYPE)
int32 j = 0;
#endif
clock_init(SYSTEM_CLOCK_96M); // 时钟配置及系统初始化<务必保留>
debug_init(); // 调试串口信息初始化
while(wifi_spi_init(WIFI_SSID_TEST, WIFI_PASSWORD_TEST))
{
printf("\r\n connect wifi failed. \r\n");
system_delay_ms(100); // 初始化失败 等待 100ms
}
printf("\r\n module version:%s",wifi_spi_version); // 模块固件版本
printf("\r\n module mac :%s",wifi_spi_mac_addr); // 模块 MAC 信息
printf("\r\n module ip :%s",wifi_spi_ip_addr_port); // 模块 IP 地址
// zf_device_wifi_spi.h 文件内的宏定义可以更改模块连接(建立) WIFI 之后,是否自动连接 TCP 服务器、创建 UDP 连接、创建 TCP 服务器等操作
if(1 != WIFI_SPI_AUTO_CONNECT) // 如果没有开启自动连接 就需要手动连接目标 IP
{
while(wifi_spi_socket_connect( // 向指定目标 IP 的端口建立 TCP 连接
"TCP", // 指定使用TCP方式通讯
WIFI_SPI_TARGET_IP, // 指定远端的IP地址,填写上位机的IP地址
WIFI_SPI_TARGET_PORT, // 指定远端的端口号,填写上位机的端口号,通常上位机默认是8080
WIFI_SPI_LOCAL_PORT)) // 指定本机的端口号
{
// 如果一直建立失败 考虑一下是不是没有接硬件复位
printf("\r\n Connect TCP Servers error, try again.");
system_delay_ms(100); // 建立连接失败 等待 100ms
}
}
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 推荐先初始化摄像头,后初始化逐飞助手
while(mt9v03x_init())
{
system_delay_ms(100);
printf("\r\n mt9v03x_init error, try again.");
}
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 逐飞助手初始化 数据传输使用高速WIFI SPI
seekfree_assistant_interface_init(SEEKFREE_ASSISTANT_WIFI_SPI);
// 如果要发送图像信息,则务必调用seekfree_assistant_camera_information_config函数进行必要的参数设置
// 如果需要发送边线则还需调用seekfree_assistant_camera_boundary_config函数设置边线的信息
#if(0 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(仅包含原始图像信息)
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
#elif(1 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点)
// 对边界数组写入数据
for(i = 0; i < MT9V03X_H; i++)
{
x1_boundary[i] = 70 - (70 - 20) * i / MT9V03X_H;
x2_boundary[i] = MT9V03X_W / 2;
x3_boundary[i] = 118 + (168 - 118) * i / MT9V03X_H;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(X_BOUNDARY, MT9V03X_H, x1_boundary, x2_boundary, x3_boundary, NULL, NULL ,NULL);
#elif(2 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有纵轴坐标,横轴坐标由图像宽度得到,意味着每个边界在一列中只会有一个点)
// 通常很少有这样的使用需求
// 对边界数组写入数据
for(i = 0; i < MT9V03X_W; i++)
{
y1_boundary[i] = i * MT9V03X_H / MT9V03X_W;
y2_boundary[i] = MT9V03X_H / 2;
y3_boundary[i] = (MT9V03X_W - i) * MT9V03X_H / MT9V03X_W;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(Y_BOUNDARY, MT9V03X_W, NULL, NULL ,NULL, y1_boundary, y2_boundary, y3_boundary);
#elif(3 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息含有横纵轴坐标)
// 这样的方式可以实现对于有回弯的边界显示
j = 0;
for(i = MT9V03X_H - 1; i >= MT9V03X_H / 2; i--)
{
// 直线部分
xy_x1_boundary[j] = 34;
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = 47;
xy_y2_boundary[j] = i;
xy_x3_boundary[j] = 60;
xy_y3_boundary[j] = i;
j++;
}
for(i = MT9V03X_H / 2 - 1; i >= 0; i--)
{
// 直线连接弯道部分
xy_x1_boundary[j] = 34 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 34) / (MT9V03X_H / 2);
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = 47 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 47) / (MT9V03X_H / 2);
xy_y2_boundary[j] = 15 + i * 3 / 4;
xy_x3_boundary[j] = 60 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 60) / (MT9V03X_H / 2);
xy_y3_boundary[j] = 30 + i / 2;
j++;
}
for(i = 0; i < MT9V03X_H / 2; i++)
{
// 回弯部分
xy_x1_boundary[j] = MT9V03X_W / 2 + i * (138 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = MT9V03X_W / 2 + i * (133 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y2_boundary[j] = 15 + i * 3 / 4;
xy_x3_boundary[j] = MT9V03X_W / 2 + i * (128 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y3_boundary[j] = 30 + i / 2;
j++;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(XY_BOUNDARY, BOUNDARY_NUM, xy_x1_boundary, xy_x2_boundary, xy_x3_boundary, xy_y1_boundary, xy_y2_boundary, xy_y3_boundary);
#elif(4 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点)
// 对边界数组写入数据
for(i = 0; i < MT9V03X_H; i++)
{
x1_boundary[i] = 70 - (70 - 20) * i / MT9V03X_H;
x2_boundary[i] = MT9V03X_W / 2;
x3_boundary[i] = 118 + (168 - 118) * i / MT9V03X_H;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, NULL, MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(X_BOUNDARY, MT9V03X_H, x1_boundary, x2_boundary, x3_boundary, NULL, NULL ,NULL);
#endif
// 此处编写用户代码 例如外设初始化代码等
while(1)
{
if(mt9v03x_finish_flag)
{
mt9v03x_finish_flag = 0;
// 在发送前将图像备份再进行发送,这样可以避免图像出现撕裂的问题
memcpy(image_copy[0], mt9v03x_image[0], MT9V03X_IMAGE_SIZE);
// 发送图像
seekfree_assistant_camera_send();
// 如果使用UDP协议传输数据则推荐在数据全部发送到模块之后立即调用wifi_spi_udp_send_now()函数,以告知模块立即将收到的数据发送到网络上
// 如果没有立即调用则模块会在持续2毫秒未收到数据后,将数据发送到网络上
// 调用wifi_spi_udp_send_now()前传输给模块的数据数量建议不要超过40960字节
// wifi_spi_udp_send_now();
}
// 此处编写需要循环执行的代码
}
}
// **************************** 代码区域 ****************************
// *************************** 例程常见问题说明 ***************************
// 问题1:串口没有数据
// 查看串口助手打开的是否是正确的串口 检查打开的 COM 口是否对应的是 Debug UART(type-c的USB-CDC) 的 COM 口
//
// 问题2:串口数据乱码
// 查看串口助手使用的波特率是否是 zf_common_debug.h 中 DEBUG_UART_BAUDRATE 宏定义的一致 默认是 115200
//
// 问题3:上位机收不到数据或者一直显示Connect TCP Servers error, try again.
// 检查默认使用的IP 地址(zf_device_wifi_spi.h 中 WIFI_SPI_TARGET_IP)是否与上位机的本机地址一致
// 检查默认使用的通信端口(zf_device_wifi_spi.h 中 WIFI_SPI_TARGET_PORT)是否与上位机的端口号一致
//
// 问题4:一直显示 connect wifi failed
// 将 WIFI_SSID_TEST 宏定义修改为你测试使用的 Wi-Fi 名称
// 将 WIFI_PASSWORD_TEST 宏定义修改为你测试使用的 Wi-Fi 密码
下面是我自己的库的main.c的代码,完全复制粘贴的逐飞的,库里面的文件也没动
/*********************************************************************************************************************
* STC32G Opensourec Library 即(STC32G 开源库)是一个基于官方 SDK 接口的第三方开源库
* Copyright (c) 2025 SEEKFREE 逐飞科技
*
* 本文件是STC32G144K开源库的一部分
*
* STC32G 开源库 是免费软件
* 您可以根据自由软件基金会发布的 GPL(GNU General Public License,即 GNU通用公共许可证)的条款
* 即 GPL 的第3版(即 GPL3.0)或(您选择的)任何后来的版本,重新发布和/或修改它
*
* 本开源库的发布是希望它能发挥作用,但并未对其作任何的保证
* 甚至没有隐含的适销性或适合特定用途的保证
* 更多细节请参见 GPL
*
* 您应该在收到本开源库的同时收到一份 GPL 的副本
* 如果没有,请参阅<https://www.gnu.org/licenses/>
*
* 额外注明:
* 本开源库使用 GPL3.0 开源许可证协议 以上许可申明为译文版本
* 许可申明英文版在 libraries/doc 文件夹下的 GPL3_permission_statement.txt 文件中
* 许可证副本在 libraries 文件夹下 即该文件夹下的 LICENSE 文件
* 欢迎各位使用并传播本程序 但修改内容时必须保留逐飞科技的版权声明(即本声明)
*
* 文件名称
* 公司名称 成都逐飞科技有限公司
* 版本信息 查看 libraries/doc 文件夹内 version 文件 版本说明
* 开发环境 MDK FOR C251
* 适用平台 STC32G144K
* 店铺链接 https://seekfree.taobao.com/
*
* 修改记录
* 日期 作者 备注
* 2024-08-01 大W first version
********************************************************************************************************************/
#include "zf_common_headfile.h"
// **************************** 代码区域 ****************************
//0:不包含边界信息
//1:包含三条边线信息,边线信息只包含横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点
//2:包含三条边线信息,边界信息只含有纵轴坐标,横轴坐标由图像宽度得到,意味着每个边界在一列中只会有一个点,一般来说很少有这样的使用需求
//3:包含三条边线信息,边界信息含有横纵轴坐标,意味着你可以指定每个点的横纵坐标,边线的数量也可以大于或者小于图像的高度,通常来说边线数量大于图像的高度,一般是搜线算法能找出回弯的情况
//4:没有图像信息,仅包含三条边线信息,边线信息只包含横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点,这样的方式可以极大的降低传输的数据量
#define INCLUDE_BOUNDARY_TYPE 0
#define WIFI_SSID_TEST "SmartCar-108"
#define WIFI_PASSWORD_TEST "Smartcar108!" // 如果需要连接的WIFI 没有密码则需要将 这里 替换为 NULL
// 边界的点数量远大于图像高度,便于保存回弯的情况
#define BOUNDARY_NUM (MT9V03X_H * 3 / 2)
// 只有X边界
uint8 xy_x1_boundary[BOUNDARY_NUM], xy_x2_boundary[BOUNDARY_NUM], xy_x3_boundary[BOUNDARY_NUM];
// 只有Y边界
uint8 xy_y1_boundary[BOUNDARY_NUM], xy_y2_boundary[BOUNDARY_NUM], xy_y3_boundary[BOUNDARY_NUM];
// X Y边界都是单独指定的
uint8 x1_boundary[MT9V03X_H], x2_boundary[MT9V03X_H], x3_boundary[MT9V03X_H];
uint8 y1_boundary[MT9V03X_W], y2_boundary[MT9V03X_W], y3_boundary[MT9V03X_W];
// 图像备份数组,在发送前将图像备份再进行发送,这样可以避免图像出现撕裂的问题
uint8 far image_copy[MT9V03X_H][MT9V03X_W];
void main (void)
{
#if(1 == INCLUDE_BOUNDARY_TYPE || 2 == INCLUDE_BOUNDARY_TYPE || 4 == INCLUDE_BOUNDARY_TYPE)
int32 i = 0;
#elif(3 == INCLUDE_BOUNDARY_TYPE)
int32 j = 0;
#endif
clock_init(SYSTEM_CLOCK_96M); // 时钟配置及系统初始化<务必保留>
debug_init(); // 调试串口信息初始化
while(wifi_spi_init(WIFI_SSID_TEST, WIFI_PASSWORD_TEST))
{
printf("\r\n connect wifi failed. \r\n");
system_delay_ms(100); // 初始化失败 等待 100ms
}
printf("\r\n module version:%s",wifi_spi_version); // 模块固件版本
printf("\r\n module mac :%s",wifi_spi_mac_addr); // 模块 MAC 信息
printf("\r\n module ip :%s",wifi_spi_ip_addr_port); // 模块 IP 地址
// zf_device_wifi_spi.h 文件内的宏定义可以更改模块连接(建立) WIFI 之后,是否自动连接 TCP 服务器、创建 UDP 连接、创建 TCP 服务器等操作
if(1 != WIFI_SPI_AUTO_CONNECT) // 如果没有开启自动连接 就需要手动连接目标 IP
{
while(wifi_spi_socket_connect( // 向指定目标 IP 的端口建立 TCP 连接
"TCP", // 指定使用TCP方式通讯
WIFI_SPI_TARGET_IP, // 指定远端的IP地址,填写上位机的IP地址
WIFI_SPI_TARGET_PORT, // 指定远端的端口号,填写上位机的端口号,通常上位机默认是8080
WIFI_SPI_LOCAL_PORT)) // 指定本机的端口号
{
// 如果一直建立失败 考虑一下是不是没有接硬件复位
printf("\r\n Connect TCP Servers error, try again.");
system_delay_ms(100); // 建立连接失败 等待 100ms
}
}
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 推荐先初始化摄像头,后初始化逐飞助手
while(mt9v03x_init())
{
system_delay_ms(100);
printf("\r\n mt9v03x_init error, try again.");
}
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 使用高速 WIFI SPI模块时无法使用屏幕(因为引脚有共用)
// 逐飞助手初始化 数据传输使用高速WIFI SPI
seekfree_assistant_interface_init(SEEKFREE_ASSISTANT_WIFI_SPI);
// 如果要发送图像信息,则务必调用seekfree_assistant_camera_information_config函数进行必要的参数设置
// 如果需要发送边线则还需调用seekfree_assistant_camera_boundary_config函数设置边线的信息
#if(0 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(仅包含原始图像信息)
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
#elif(1 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点)
// 对边界数组写入数据
for(i = 0; i < MT9V03X_H; i++)
{
x1_boundary[i] = 70 - (70 - 20) * i / MT9V03X_H;
x2_boundary[i] = MT9V03X_W / 2;
x3_boundary[i] = 118 + (168 - 118) * i / MT9V03X_H;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(X_BOUNDARY, MT9V03X_H, x1_boundary, x2_boundary, x3_boundary, NULL, NULL ,NULL);
#elif(2 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有纵轴坐标,横轴坐标由图像宽度得到,意味着每个边界在一列中只会有一个点)
// 通常很少有这样的使用需求
// 对边界数组写入数据
for(i = 0; i < MT9V03X_W; i++)
{
y1_boundary[i] = i * MT9V03X_H / MT9V03X_W;
y2_boundary[i] = MT9V03X_H / 2;
y3_boundary[i] = (MT9V03X_W - i) * MT9V03X_H / MT9V03X_W;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(Y_BOUNDARY, MT9V03X_W, NULL, NULL ,NULL, y1_boundary, y2_boundary, y3_boundary);
#elif(3 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息含有横纵轴坐标)
// 这样的方式可以实现对于有回弯的边界显示
j = 0;
for(i = MT9V03X_H - 1; i >= MT9V03X_H / 2; i--)
{
// 直线部分
xy_x1_boundary[j] = 34;
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = 47;
xy_y2_boundary[j] = i;
xy_x3_boundary[j] = 60;
xy_y3_boundary[j] = i;
j++;
}
for(i = MT9V03X_H / 2 - 1; i >= 0; i--)
{
// 直线连接弯道部分
xy_x1_boundary[j] = 34 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 34) / (MT9V03X_H / 2);
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = 47 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 47) / (MT9V03X_H / 2);
xy_y2_boundary[j] = 15 + i * 3 / 4;
xy_x3_boundary[j] = 60 + (MT9V03X_H / 2 - i) * (MT9V03X_W / 2 - 60) / (MT9V03X_H / 2);
xy_y3_boundary[j] = 30 + i / 2;
j++;
}
for(i = 0; i < MT9V03X_H / 2; i++)
{
// 回弯部分
xy_x1_boundary[j] = MT9V03X_W / 2 + i * (138 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y1_boundary[j] = i;
xy_x2_boundary[j] = MT9V03X_W / 2 + i * (133 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y2_boundary[j] = 15 + i * 3 / 4;
xy_x3_boundary[j] = MT9V03X_W / 2 + i * (128 - MT9V03X_W / 2) / (MT9V03X_H / 2);
xy_y3_boundary[j] = 30 + i / 2;
j++;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, image_copy[0], MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(XY_BOUNDARY, BOUNDARY_NUM, xy_x1_boundary, xy_x2_boundary, xy_x3_boundary, xy_y1_boundary, xy_y2_boundary, xy_y3_boundary);
#elif(4 == INCLUDE_BOUNDARY_TYPE)
// 发送总钻风图像信息(并且包含三条边界信息,边界信息只含有横轴坐标,纵轴坐标由图像高度得到,意味着每个边界在一行中只会有一个点)
// 对边界数组写入数据
for(i = 0; i < MT9V03X_H; i++)
{
x1_boundary[i] = 70 - (70 - 20) * i / MT9V03X_H;
x2_boundary[i] = MT9V03X_W / 2;
x3_boundary[i] = 118 + (168 - 118) * i / MT9V03X_H;
}
seekfree_assistant_camera_information_config(SEEKFREE_ASSISTANT_MT9V03X, NULL, MT9V03X_W, MT9V03X_H);
seekfree_assistant_camera_boundary_config(X_BOUNDARY, MT9V03X_H, x1_boundary, x2_boundary, x3_boundary, NULL, NULL ,NULL);
#endif
// 此处编写用户代码 例如外设初始化代码等
while(1)
{
if(mt9v03x_finish_flag)
{
mt9v03x_finish_flag = 0;
// 在发送前将图像备份再进行发送,这样可以避免图像出现撕裂的问题
memcpy(image_copy[0], mt9v03x_image[0], MT9V03X_IMAGE_SIZE);
// 发送图像
seekfree_assistant_camera_send();
}
// 此处编写需要循环执行的代码
}
}
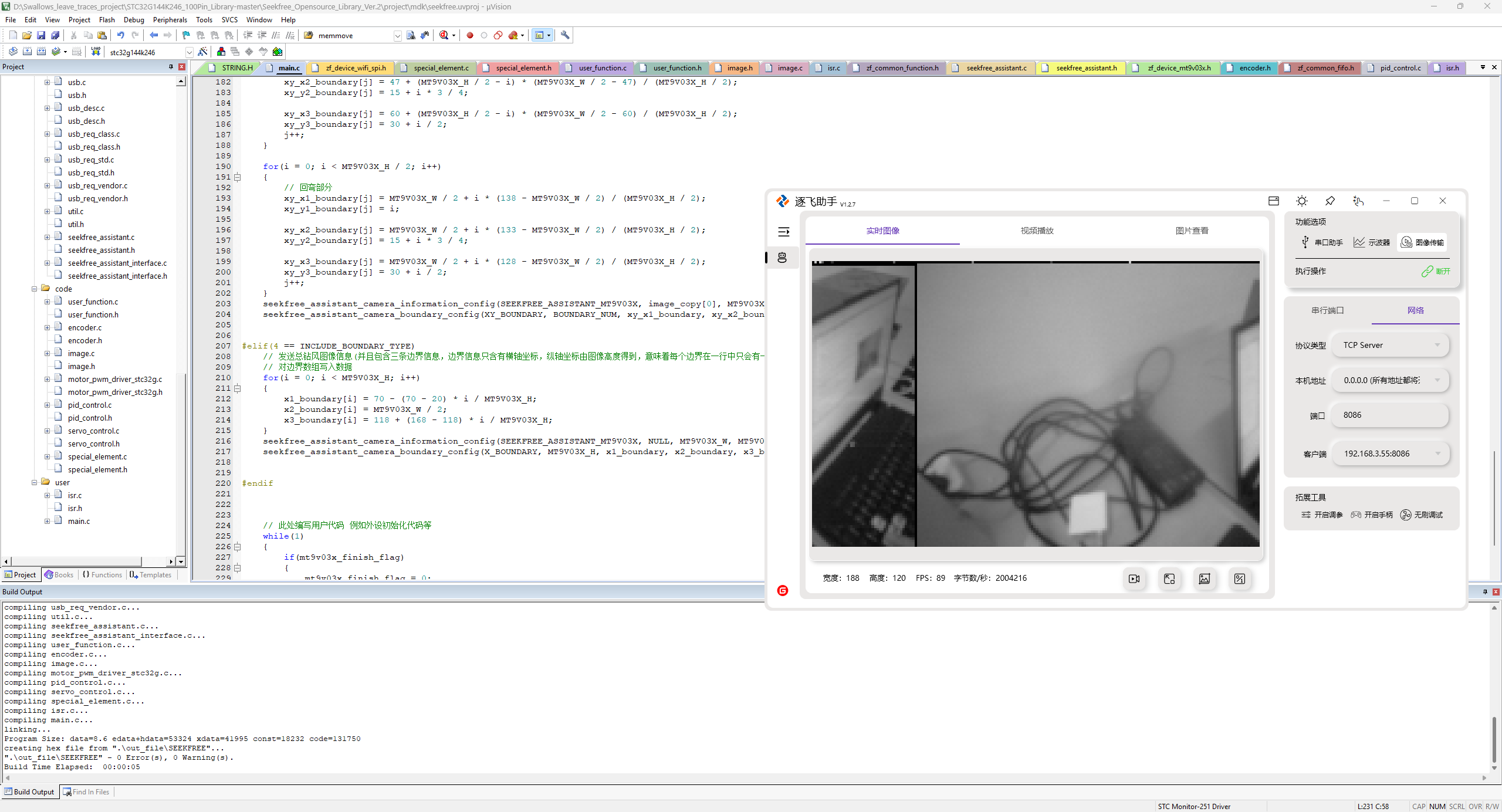
这个图像就是最右边的一部分移到最左边了,传输复制的图像才有这个问题,原图没有问题,想问一下是什么原因导致的





