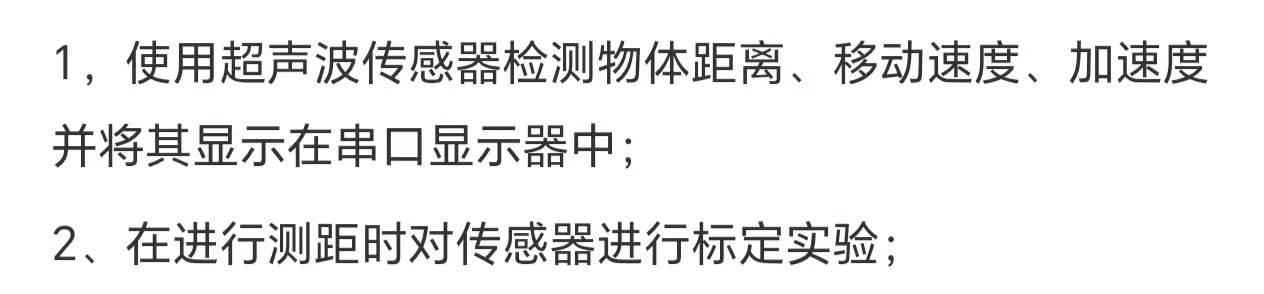
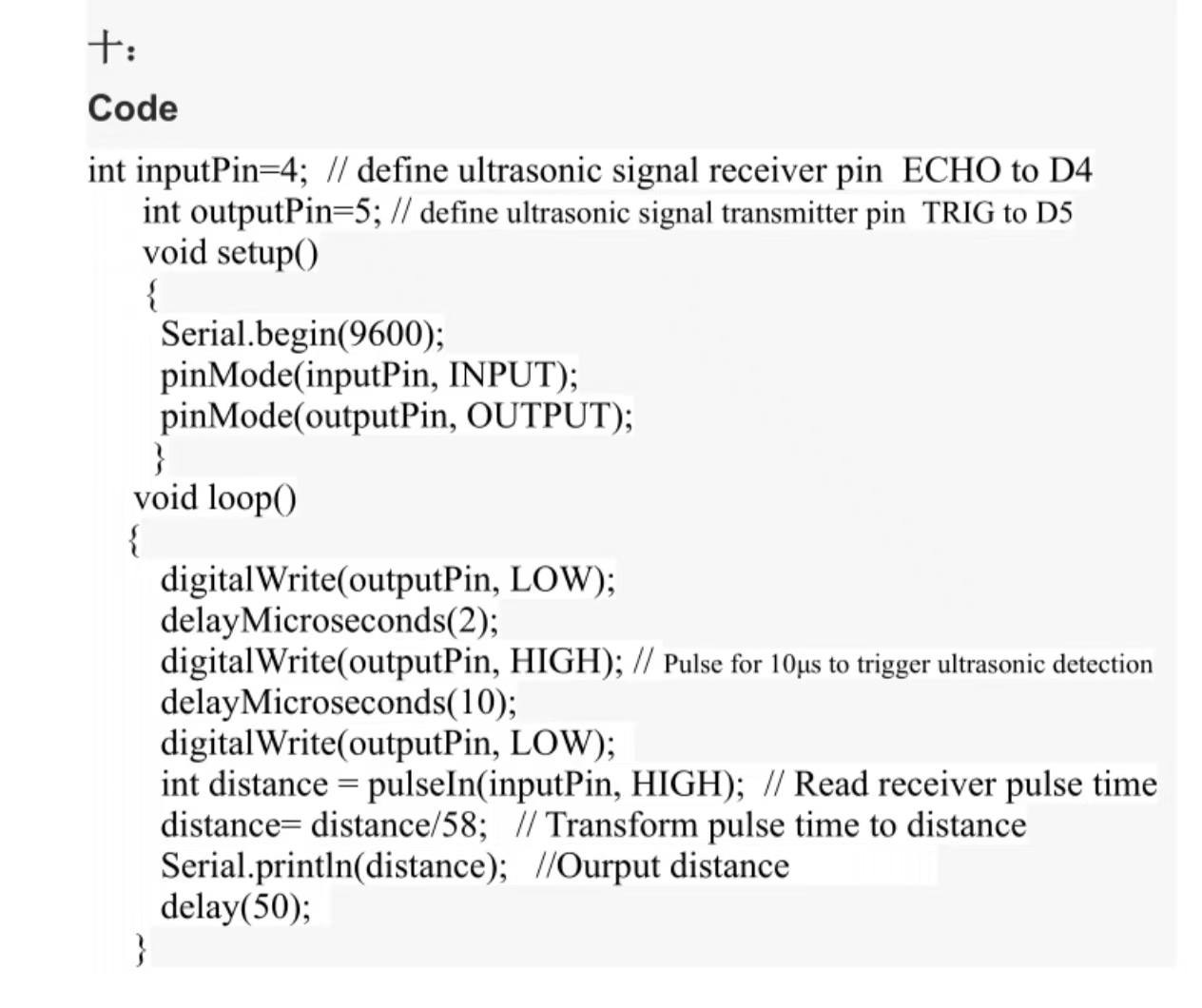
按照相关的要求,怎么改写这个超声波测距程序,求各位编写改一下这个程序

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
你提到的“超声波测试实验”通常是指通过超声波传感器(如HC-SR04)测量物体与传感器之间的距离。这个实验在嵌入式系统中非常常见,尤其是在使用单片机(如STM32、Arduino、51单片机等)进行开发时。
下面我将根据你的问题,详细说明如何改写和优化超声波测距程序,并提供一个通用的示例代码(以Arduino为例),同时列出关键步骤和注意事项。
超声波测距的核心是利用声速和回波时间差来计算距离:
距离 = (声速 × 时间) / 2pulseIn() 函数获取ECHO引脚的高电平持续时间(单位为微秒)// 定义引脚
#define TRIG_PIN 9
#define ECHO_PIN 10
void setup() {
// 设置引脚模式
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
// 初始化串口通信
Serial.begin(9600);
}
void loop() {
// 触发超声波
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// 测量回波时间
long duration = pulseIn(ECHO_PIN, HIGH);
// 计算距离(单位:厘米)
float distance = (duration * 0.034) / 2;
// 输出结果
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// 延迟1秒
delay(1000);
}
pulseIn()。duration 是否超出合理范围(如大于20000 μs)。pulseIn() 可以方便地获取回波时间,但要注意其局限性#include "main.h"
#include "stdio.h"
UART_HandleTypeDef huart1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
uint32_t start_time, end_time;
float distance;
while (1) {
// Trigger pulse
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
HAL_Delay(10); // 10us
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
// Wait for echo
while (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET);
start_time = HAL_GetTick();
while (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_SET);
end_time = HAL_GetTick();
// Calculate distance
distance = (end_time - start_time) * 0.034 / 2;
char buffer[50];
sprintf(buffer, "Distance: %.2f cm\r\n", distance);
HAL_UART_Transmit(&huart1, (uint8_t*)buffer, strlen(buffer), 1000);
HAL_Delay(1000);
}
}
如果你希望改写超声波测距程序,核心在于理解硬件接口、时间测量和距离计算逻辑。建议根据具体使用的开发板(如Arduino、STM32等)选择合适的编程方式,并注意添加错误处理和优化性能。
如需进一步帮助(例如适配特定开发板或添加功能),请提供更多细节!
分享 创建了问题
3月19日
创建了问题
3月19日


