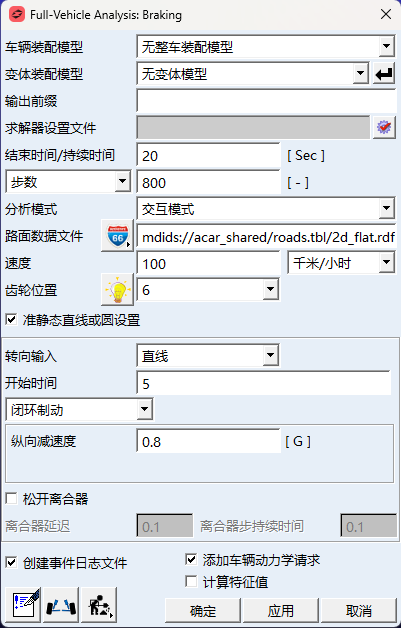
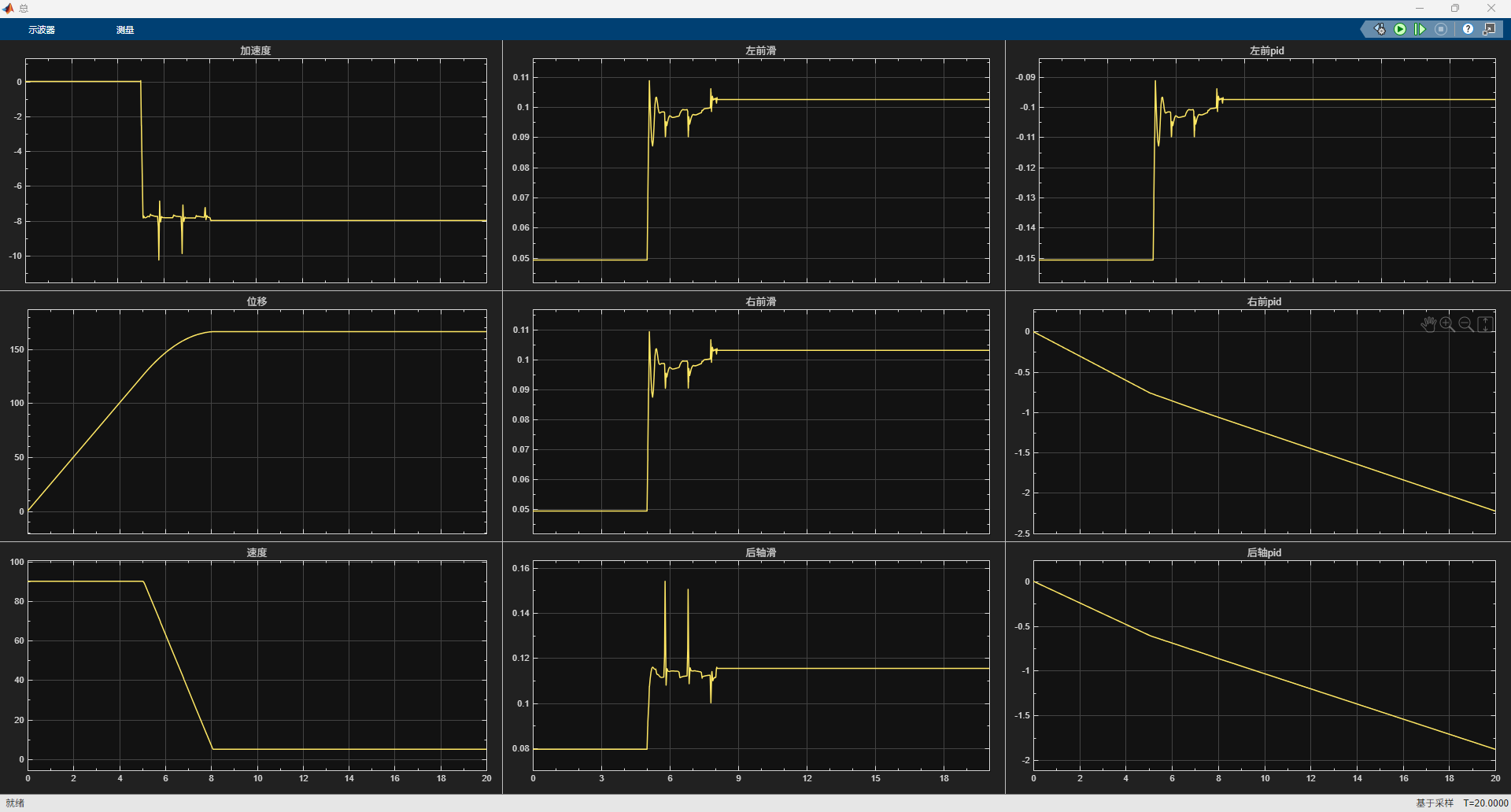
adams制动实验加速度和滑移率振荡严重
adamscar与simulink联合仿真,adams是2024.2版本,matlab是2025b版本
重新做了几次全部都是一样的振荡严重,不知是何种原因
######我想不知道是制动压力过大还是说是什么参数没调好

######我想不知道是制动压力过大还是说是什么参数没调好
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
在 ADAMS/Car 与 MATLAB/Simulink 联合仿真中,加速度和滑移率振荡严重 是一个常见的问题。这可能由多种原因引起,包括但不限于:
在 Simulink 中优化 PID 控制器参数:
% 示例:PID 控制器参数调整
Kp = 0.5; % 初始值
Ki = 0.1;
Kd = 0.01;
限制最大制动压力:
检查轮胎滑移率-制动力曲线:
调整制动器特性:
检查 FMU 导出设置:
在 Simulink 中检查 S-Function 或 FMU 接口模块:
在 ADAMS 中更改积分方法:
在 Simulink 中调整求解器设置:
在 Simulink 中加入低通滤波器:
% 示例:低通滤波器
[num, den] = butter(2, 0.1); % 截止频率为 0.1 rad/s
从简单测试开始:
逐步引入控制逻辑:
使用 MATLAB 的 Simulink Real-Time 工具进行实时仿真:
对比实验:
% PID 控制器参数
Kp = 0.8; % 比例增益
Ki = 0.05; % 积分增益
Kd = 0.01; % 微分增益
% 创建 PID 控制器
pidController = pid(Kp, Ki, Kd);
% 添加到 Simulink 模型中
add_block('simulink/Continuous/PID Controller', 'YourModel/PID_Controller');
set_param('YourModel/PID_Controller', 'Kp', num2str(Kp), ...
'Ki', num2str(Ki), ...
'Kd', num2str(Kd), ...
'IntegralLimit', '[-1,1]');
| 问题 | 原因 | 解决方案 | |------|------|----------| | 加速度振荡 | 制动压力过大、PID 参数不当 | 优化 PID 参数,限制最大制动压力 | | 滑移率振荡 | 轮胎模型不准确、控制逻辑问题 | 校准轮胎参数,添加滤波器 | | 数值不稳定 | 积分方法或步长设置不当 | 更改积分方法,减小仿真步长 | | 接口问题 | FMU 导出或 Simulink 接口配置错误 | 验证信号连接,确保一致性 |
如果你愿意提供具体的 ADAMS 模型结构 或 Simulink 控制逻辑图,我可以进一步帮助你定位问题根源。
分享 修改了问题
3月24日
创建了问题
3月24日
修改了问题
3月24日
创建了问题
3月24日
