
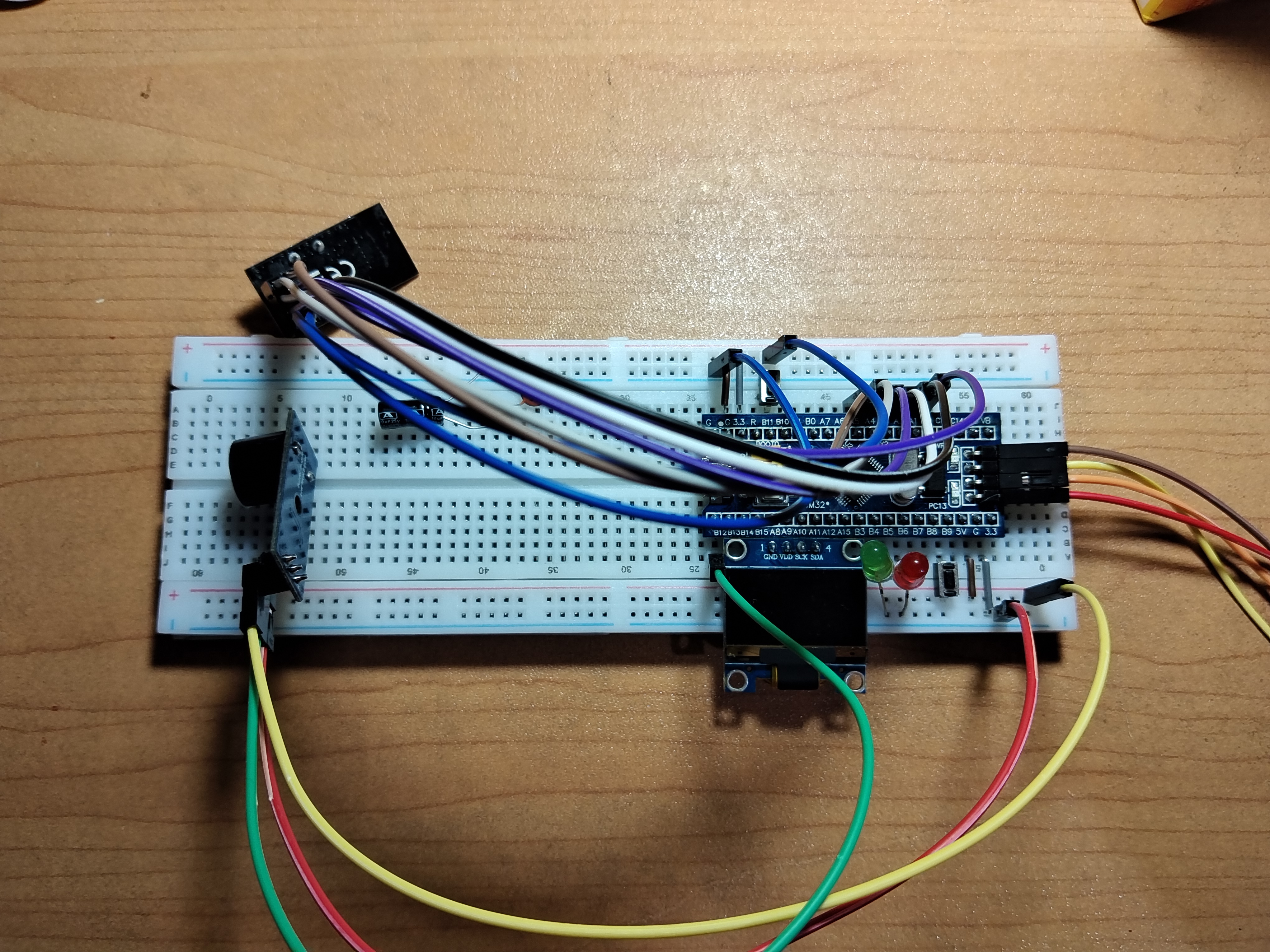
上板后主机连接很不稳定,哪怕主从机挨在一起,也在报警和正常一直跳变,从机好一些。寻找模式也没作用,消音消不了5s,只有按下松开后的瞬间消音(轻触按键),主从机有一方断开后,另一个持续报警,这个没问题,OLED显示情况和状态是对上的。
电路连接情况如下
main程序:
#include "stm32f10x.h"
#include "delay.h"
#include "key.h"
#include "beep.h"
#include "oled.h"
#include "led.h"
#include "NRF24L01.h"
// 一块写1,一块写0
#define IS_HOST 1
// 超稳参数(不跳 + 反应快)
#define LOST_COUNT_MAX 25
#define RESTORE_COUNT 10
#define MUTE_DURATION 5000
#define BLINK_INTERVAL 200
typedef enum {
STATUS_UNPAIR,
STATUS_NORMAL,
STATUS_SEARCH,
STATUS_ALARM,
STATUS_MUTE
} Status;
Status sta = STATUS_UNPAIR;
Status last_sta = STATUS_UNPAIR;
uint8_t paired = 0;
uint16_t lost_cnt = 0;
uint32_t mute_timer = 0;
uint32_t blink_timer = 0;
uint8_t blink_flag = 0;
// 保存最新收到的指令
uint8_t last_cmd = 0;
int main(void)
{
KEY_Init();
Beep_Init();
LED_Init();
OLED_Init();
delay_ms(100);
NRF24L01_Init();
OLED_Clear();
OLED_ShowString(1, 1, IS_HOST ? "HOST" : "SLAVE");
OLED_ShowString(2, 1, "UNPAIRED");
while (1)
{
// 非阻塞闪烁
if (blink_timer < 50) blink_timer = BLINK_INTERVAL;
blink_timer -= 50;
if (blink_timer == 0) {
blink_flag ^= 1;
}
// ===================== 固定流程:收 → 处理 → 发 =====================
uint8_t rec_result = NRF24L01_Receive();
if (rec_result == 1)
{
paired = 1;
lost_cnt = 0;
last_cmd = NRF24L01_RxPacket[0];
}
else
{
if (paired && lost_cnt < 200) lost_cnt++;
}
// 处理寻物指令(必须在这里处理,最稳定)
if (paired && sta == STATUS_NORMAL)
{
if (IS_HOST && last_cmd == 0xCC)
{
sta = STATUS_ALARM; // 从机寻主机
}
if (!IS_HOST && last_cmd == 0xBB)
{
sta = STATUS_ALARM; // 主机寻从机
}
}
// 发送(收完再发)
if (IS_HOST)
{
NRF24L01_TxPacket[0] = (sta == STATUS_SEARCH) ? 0xBB : 0xAA;
}
else
{
// 从机:主机在寻我时,我不能发寻物指令
if (last_cmd == 0xBB)
{
NRF24L01_TxPacket[0] = 0xAA;
}
else
{
NRF24L01_TxPacket[0] = (sta == STATUS_SEARCH) ? 0xCC : 0xAA;
}
}
NRF24L01_Send();
delay_ms(10); // 必须加!防止NRF切换太快丢包
// ===================== 状态机 =====================
if (paired && sta == STATUS_UNPAIR)
sta = STATUS_NORMAL;
if (paired && lost_cnt > LOST_COUNT_MAX)
sta = STATUS_ALARM;
if (paired && lost_cnt < RESTORE_COUNT)
{
if (sta == STATUS_ALARM || sta == STATUS_MUTE)
{
sta = STATUS_NORMAL;
mute_timer = 0;
}
}
// 消音
if (mute_timer > 0) mute_timer -= 50;
if (mute_timer == 0 && sta == STATUS_MUTE)
sta = STATUS_ALARM;
// ===================== 按键 =====================
if (paired)
{
if (KEY_Mode_Press())
{
if (sta == STATUS_NORMAL)
{
sta = STATUS_SEARCH;
}
else if (sta == STATUS_SEARCH)
{
sta = STATUS_NORMAL;
}
}
}
if (KEY_Mute_Press() && sta == STATUS_ALARM)
{
sta = STATUS_MUTE;
mute_timer = MUTE_DURATION;
}
// 强制:主机寻物时,从机不能寻物
if (!IS_HOST && last_cmd == 0xBB && sta == STATUS_SEARCH)
{
sta = STATUS_ALARM;
}
// ===================== OLED =====================
if (sta != last_sta)
{
OLED_Clear();
last_sta = sta;
}
OLED_ShowString(1, 1, IS_HOST ? "HOST" : "SLAVE");
// ===================== 声光 =====================
switch (sta)
{
case STATUS_UNPAIR:
blink_flag ? LED_Green_On() : LED_Green_Off();
LED_Red_Off(); Beep_Off();
OLED_ShowString(2, 1, "UNPAIRED");
break;
case STATUS_NORMAL:
LED_Green_On(); LED_Red_Off(); Beep_Off();
OLED_ShowString(2, 1, "NORMAL ");
OLED_ShowString(4, 1, "CONNECTED ");
break;
case STATUS_SEARCH:
LED_Green_Off(); LED_Red_On(); Beep_Off();
OLED_ShowString(2, 1, "SEARCHING ");
break;
case STATUS_ALARM:
LED_Green_Off();
blink_flag ? LED_Red_On() : LED_Red_Off();
Beep_On();
OLED_ShowString(2, 1, "ALARM!!! ");
break;
case STATUS_MUTE:
LED_Green_Off();
blink_flag ? LED_Red_On() : LED_Red_Off();
Beep_Off();
OLED_ShowString(2, 1, "MUTE ");
break;
}
delay_ms(40);
}
}
江协科技的nrf24l01驱动
#ifndef __NRF24L01_DEFINE_H
#define __NRF24L01_DEFINE_H
/*NRF24L01指令宏定义*/
#define NRF24L01_R_REGISTER 0x00 //读寄存器,高3位为指令码,低5位为寄存器地址,后续跟1~5字节读数据
#define NRF24L01_W_REGISTER 0x20 //写寄存器,高3位为指令码,低5位为寄存器地址,后续跟1~5字节写数据
#define NRF24L01_R_RX_PAYLOAD 0x61 //读Rx有效载荷,后续跟1~32字节读数据
#define NRF24L01_W_TX_PAYLOAD 0xA0 //写Tx有效载荷,后续跟1~32字节写数据
#define NRF24L01_FLUSH_TX 0xE1 //清空Tx FIFO所有数据,单独指令
#define NRF24L01_FLUSH_RX 0xE2 //清空Rx FIFO所有数据,单独指令
#define NRF24L01_REUSE_TX_PL 0xE3 //重新使用最后一次发送的有效载荷,单独指令
#define NRF24L01_R_RX_PL_WID 0x60 //读取Rx FIFO最前面一个数据包的宽度,后续跟1字节读数据,仅适用于动态包长模式
#define NRF24L01_W_ACK_PAYLOAD 0xA8 //写应答附带的有效载荷,高5位为指令码,低3位为通道号,后续跟1~32字节写数据,仅适用于应答附带载荷模式
#define NRF24L01_W_TX_PAYLOAD_NOACK 0xB0 //写Tx有效载荷,不要求应答,后续跟1~32字节写数据,仅适用于不要求应答模式
#define NRF24L01_NOP 0xFF //空操作,单独指令,可以用读取状态寄存器
/*NRF24L01寄存器地址宏定义*/
#define NRF24L01_CONFIG 0x00 //配置寄存器,1字节
#define NRF24L01_EN_AA 0x01 //使能自动应答,1字节
#define NRF24L01_EN_RXADDR 0x02 //使能接收通道,1字节
#define NRF24L01_SETUP_AW 0x03 //设置地址宽度,1字节
#define NRF24L01_SETUP_RETR 0x04 //设置自动重传,1字节
#define NRF24L01_RF_CH 0x05 //射频通道,1字节
#define NRF24L01_RF_SETUP 0x06 //射频相关参数设置,1字节
#define NRF24L01_STATUS 0x07 //状态寄存器,1字节
#define NRF24L01_OBSERVE_TX 0x08 //发送观察寄存器,1字节
#define NRF24L01_RPD 0x09 //接收功率检测,1字节
#define NRF24L01_RX_ADDR_P0 0x0A //接收通道0地址,5字节
#define NRF24L01_RX_ADDR_P1 0x0B //接收通道1地址,5字节
#define NRF24L01_RX_ADDR_P2 0x0C //接收通道2地址,1字节,高位地址与接收通道1相同
#define NRF24L01_RX_ADDR_P3 0x0D //接收通道3地址,1字节,高位地址与接收通道1相同
#define NRF24L01_RX_ADDR_P4 0x0E //接收通道4地址,1字节,高位地址与接收通道1相同
#define NRF24L01_RX_ADDR_P5 0x0F //接收通道5地址,1字节,高位地址与接收通道1相同
#define NRF24L01_TX_ADDR 0x10 //发送地址,5字节
#define NRF24L01_RX_PW_P0 0x11 //接收通道0有效载荷数据宽度,1字节
#define NRF24L01_RX_PW_P1 0x12 //接收通道1有效载荷的数据宽度,1字节
#define NRF24L01_RX_PW_P2 0x13 //接收通道2有效载荷的数据宽度,1字节
#define NRF24L01_RX_PW_P3 0x14 //接收通道3有效载荷的数据宽度,1字节
#define NRF24L01_RX_PW_P4 0x15 //接收通道4有效载荷的数据宽度,1字节
#define NRF24L01_RX_PW_P5 0x16 //接收通道5有效载荷的数据宽度,1字节
#define NRF24L01_FIFO_STATUS 0x17 //发送和接收FIFO状态,1字节
#define NRF24L01_DYNPD 0x1C //使能接收通道的动态包长模式,1字节
#define NRF24L01_FEATURE 0x1D //使能高级功能,1字节
#endif
#ifndef __NRF24L01_H
#define __NRF24L01_H
#include "NRF24L01_Define.h"
/*外部可调用全局数组***********/
extern uint8_t NRF24L01_TxAddress[];
extern uint8_t NRF24L01_TxPacket[];
extern uint8_t NRF24L01_RxAddress[];
extern uint8_t NRF24L01_RxPacket[];
/***********外部可调用全局数组*/
/*函数声明*********************/
/*指令实现*/
uint8_t NRF24L01_ReadReg(uint8_t RegAddress);
void NRF24L01_ReadRegs(uint8_t RegAddress, uint8_t *DataArray, uint8_t Count);
void NRF24L01_WriteReg(uint8_t RegAddress, uint8_t Data);
void NRF24L01_WriteRegs(uint8_t RegAddress, uint8_t *DataArray, uint8_t Count);
void NRF24L01_ReadRxPayload(uint8_t *DataArray, uint8_t Count);
void NRF24L01_WriteTxPayload(uint8_t *DataArray, uint8_t Count);
void NRF24L01_FlushTx(void);
void NRF24L01_FlushRx(void);
uint8_t NRF24L01_ReadStatus(void);
/*功能函数*/
void NRF24L01_PowerDown(void);
void NRF24L01_StandbyI(void);
void NRF24L01_Rx(void);
void NRF24L01_Tx(void);
void NRF24L01_Init(void);
uint8_t NRF24L01_Send(void);
uint8_t NRF24L01_Receive(void);
void NRF24L01_UpdateRxAddress(void);
/*********************函数声明*/
#endif
#include "stm32f10x.h"
#include "NRF24L01_Define.h"
/*全局变量*********************/
/*发送部分*/
uint8_t NRF24L01_TxAddress[5] = {0x11, 0x22, 0x33, 0x44, 0x55}; //发送地址,固定5字节
#define NRF24L01_TX_PACKET_WIDTH 4 //发送数据包宽度,范围:1~32字节
uint8_t NRF24L01_TxPacket[NRF24L01_TX_PACKET_WIDTH]; //发送数据包
/*接收部分*/
uint8_t NRF24L01_RxAddress[5] = {0x11, 0x22, 0x33, 0x44, 0x55}; //接收通道0地址,固定5字节
#define NRF24L01_RX_PACKET_WIDTH 4 //接收通道0数据包宽度,范围:1~32字节
uint8_t NRF24L01_RxPacket[NRF24L01_RX_PACKET_WIDTH]; //接收数据包
/**
* 提示:设备A和设备B进行通信
* A发B收时,A的发送地址、发送数据包宽度要与B的接收地址、接收数据包宽度对应相同
* B发A收时,B的发送地址、发送数据包宽度要与A的接收地址、接收数据包宽度对应相同
* 通常情况下,可以将A和B的发送地址、接收地址全设置一样,A和B的发送数据包宽度、接收数据包宽度也全设置一样
* 这样A和B可以使用完全一样的模块程序,操作更加方便,也不容易搞混
*
*/
/*********************全局变量*/
/*引脚配置*********************/
/**
* 函 数:NRF24L01写CE高低电平
* 参 数:要写入CE的电平值,范围:0/1
* 返 回 值:无
* 说 明:当上层函数需要写CE时,此函数会被调用
* 用户需要根据参数传入的值,将CE置为高电平或者低电平
* 当参数传入0时,置CE为低电平,当参数传入1时,置CE为高电平
*/
void NRF24L01_W_CE(uint8_t BitValue)
{
/*根据BitValue的值,将CE置高电平或者低电平*/
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)BitValue);
}
/**
* 函 数:NRF24L01写CSN高低电平
* 参 数:要写入CSN的电平值,范围:0/1
* 返 回 值:无
* 说 明:当上层函数需要写CSN时,此函数会被调用
* 用户需要根据参数传入的值,将CSN置为高电平或者低电平
* 当参数传入0时,置CSN为低电平,当参数传入1时,置CSN为高电平
*/
void NRF24L01_W_CSN(uint8_t BitValue)
{
/*根据BitValue的值,将CSN置高电平或者低电平*/
GPIO_WriteBit(GPIOA, GPIO_Pin_1, (BitAction)BitValue);
}
/**
* 函 数:NRF24L01写SCK高低电平
* 参 数:要写入SCK的电平值,范围:0/1
* 返 回 值:无
* 说 明:当上层函数需要写SCK时,此函数会被调用
* 用户需要根据参数传入的值,将SCK置为高电平或者低电平
* 当参数传入0时,置SCK为低电平,当参数传入1时,置SCK为高电平
*/
void NRF24L01_W_SCK(uint8_t BitValue)
{
/*根据BitValue的值,将SCK置高电平或者低电平*/
GPIO_WriteBit(GPIOA, GPIO_Pin_2, (BitAction)BitValue);
}
/**
* 函 数:NRF24L01写MOSI高低电平
* 参 数:要写入MOSI的电平值,范围:0/1
* 返 回 值:无
* 说 明:当上层函数需要写MOSI时,此函数会被调用
* 用户需要根据参数传入的值,将MOSI置为高电平或者低电平
* 当参数传入0时,置MOSI为低电平,当参数传入1时,置MOSI为高电平
*/
void NRF24L01_W_MOSI(uint8_t BitValue)
{
/*根据BitValue的值,将MOSI置高电平或者低电平*/
GPIO_WriteBit(GPIOA, GPIO_Pin_3, (BitAction)BitValue);
}
/**
* 函 数:NRF24L01读MISO高低电平
* 参 数:无
* 返 回 值:读取得到MISO的电平值,范围:0/1
* 说 明:当上层函数需要读MISO时,此函数会被调用
* 用户需要读取MISO引脚,返回此引脚的高低电平状态
* 当MISO为高电平时,返回1,当MISO为低电平时,返回0
*/
uint8_t NRF24L01_R_MISO(void)
{
/*取MISO引脚的高低电平并返回*/
return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_4);
}
/**
* 本代码使用查询的方式获取设备状态,因此不需要使用IRQ引脚
*/
/**
* 函 数:NRF24L01引脚初始化
* 参 数:无
* 返 回 值:无
* 说 明:当上层函数需要初始化时,此函数会被调用
* 用户需要将CSN、CE、MISO、SCK引脚初始化为推挽输出模式,MISO引脚初始化为上拉输入模式
*/
void NRF24L01_GPIO_Init(void)
{
/*开启GPIO时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/*将CE、CSN、SCK、MOSI引脚初始化为推挽输出模式*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*将MISO引脚初始化为上拉输入模式*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*置引脚初始化后的默认电平*/
NRF24L01_W_CE(0); //CE默认为0,退出收发模式
NRF24L01_W_CSN(1); //CSN默认为1,不选中从机
NRF24L01_W_SCK(0); //SCK默认为0,对应SPI模式0
NRF24L01_W_MOSI(0); //MOSI默认电平随意,1和0均可
}
/*********************引脚配置*/
/*通信协议*********************/
/**
* 函 数:SPI交换一个字节
* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF
* 返 回 值:接收得到的一个字节数据,范围:0x00~0xFF
*/
uint8_t NRF24L01_SPI_SwapByte(uint8_t Byte)
{
uint8_t i;
/*此处使用SPI模式0进行通信*/
/*循环8次,主机依次移出和移入数据的每一位*/
for (i = 0; i < 8; i ++)
{
/*SPI为高位先行,因此移出高位至MOSI引脚*/
if (Byte & 0x80) //判断Byte的最高位
{
NRF24L01_W_MOSI(1); //如果为1,则给MOSI输出1
}
else
{
NRF24L01_W_MOSI(0); //如果为0,则给MOSI输出0
}
Byte <<= 1; //Byte左移一位,最低位空出来用于接收数据位
/*产生SCK上升沿*/
NRF24L01_W_SCK(1);
/*从MISO引脚移入数据,存入Byte的最低位*/
if (NRF24L01_R_MISO()) //读取MISO引脚
{
Byte |= 0x01; //如果为1,则给Byte最低位置1
} //如果为0,则不做任何操作,因为左移后低位默认补0
/*产生SCK下降沿*/
NRF24L01_W_SCK(0);
}
/*返回Byte数据,此时的Byte为SPI交换接收得到的一个字节数据*/
return Byte;
}
/*********************通信协议*/
/*指令实现*********************/
/**
* 函 数:NRF24L01读取寄存器(一个字节)
* 参 数:RegAddress 指定寄存器地址,范围:0x00~0x1F
* 返 回 值:指定寄存器的数据,范围:0x00~0xFF
*/
uint8_t NRF24L01_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,读寄存器(低5位为寄存器地址)*/
NRF24L01_SPI_SwapByte(NRF24L01_R_REGISTER | RegAddress);
/*发送读寄存器指令后,开始交换接收,得到指定地址的数据*/
Data = NRF24L01_SPI_SwapByte(NRF24L01_NOP);
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
/*返回读到的一个字节数据*/
return Data;
}
/**
* 函 数:NRF24L01读取寄存器(多个字节)
* 参 数:RegAddress 指定寄存器的地址,范围:0x00~0x1F
* 参 数:DataArray 读取得到的数据数组,输出参数
* 参 数:Count 指定读取的数量,范围:0~5
* 返 回 值:无
*/
void NRF24L01_ReadRegs(uint8_t RegAddress, uint8_t *DataArray, uint8_t Count)
{
uint8_t i;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,读寄存器(低5位为寄存器地址)*/
NRF24L01_SPI_SwapByte(NRF24L01_R_REGISTER | RegAddress);
/*发送读寄存器指令后,开始交换接收,循环接收多次,得到指定地址下的多个数据*/
for (i = 0; i < Count; i ++)
{
/*将接收到的数据写入到输出参数DataArray中*/
DataArray[i] = NRF24L01_SPI_SwapByte(NRF24L01_NOP);
}
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01写入寄存器(一个字节)
* 参 数:RegAddress 指定寄存器地址,范围:0x00~0x1F
* 参 数:Data 要写入的一个字节数据,范围:0x00~0xFF
* 返 回 值:无
*/
void NRF24L01_WriteReg(uint8_t RegAddress, uint8_t Data)
{
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,写寄存器(低5位为寄存器地址)*/
NRF24L01_SPI_SwapByte(NRF24L01_W_REGISTER | RegAddress);
/*发送写寄存器指令后,开始交换发送,在指定地址下写入数据*/
NRF24L01_SPI_SwapByte(Data);
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01写入寄存器(多个字节)
* 参 数:RegAddress 指定寄存器地址,范围:0x00~0x1F
* 参 数:DataArray 要写入的数据数组,输入参数
* 参 数:Count 指定写入的数量,范围:0~5
* 返 回 值:无
*/
void NRF24L01_WriteRegs(uint8_t RegAddress, uint8_t *DataArray, uint8_t Count)
{
uint8_t i;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,写寄存器(低5位为寄存器地址)*/
NRF24L01_SPI_SwapByte(NRF24L01_W_REGISTER | RegAddress);
/*发送写寄存器指令后,开始交换发送,循环发送多次,在指定地址下写入多个数据*/
for (i = 0; i < Count; i ++)
{
/*将输入参数DataArray的数据写入到指定地址中*/
NRF24L01_SPI_SwapByte(DataArray[i]);
}
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01读取Rx有效载荷
* 参 数:DataArray 读取得到的数据数组,输出参数
* 参 数:Count 指定读取的数量,范围:0~32
* 返 回 值:无
*/
void NRF24L01_ReadRxPayload(uint8_t *DataArray, uint8_t Count)
{
uint8_t i;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,读取Rx有效载荷*/
NRF24L01_SPI_SwapByte(NRF24L01_R_RX_PAYLOAD);
/*发送读取Rx有效载荷指令后,开始交换接收,循环接收多次,得到多个数据*/
for (i = 0; i < Count; i ++)
{
/*将读取的数据写入到输出参数DataArray中*/
DataArray[i] = NRF24L01_SPI_SwapByte(NRF24L01_NOP);
}
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01写入Tx有效载荷
* 参 数:DataArray 要写入的数据数组,输入参数
* 参 数:Count 指定写入的数量,范围:0~5
* 返 回 值:无
*/
void NRF24L01_WriteTxPayload(uint8_t *DataArray, uint8_t Count)
{
uint8_t i;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,写入Tx有效载荷*/
NRF24L01_SPI_SwapByte(NRF24L01_W_TX_PAYLOAD);
/*发送写入Tx有效载荷指令后,开始交换发送,循环发送多次,写入多个数据*/
for (i = 0; i < Count; i ++)
{
/*将输入参数DataArray的数据写入到Tx有效载荷中*/
NRF24L01_SPI_SwapByte(DataArray[i]);
}
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01清空Tx FIFO的所有数据
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_FlushTx(void)
{
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,清空Tx FIFO*/
NRF24L01_SPI_SwapByte(NRF24L01_FLUSH_TX);
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01清空Rx FIFO的所有数据
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_FlushRx(void)
{
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,清空Rx FIFO*/
NRF24L01_SPI_SwapByte(NRF24L01_FLUSH_RX);
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
}
/**
* 函 数:NRF24L01读取状态寄存器
* 参 数:无
* 返 回 值:状态寄存器的值,范围:0x00~0xFF
*/
uint8_t NRF24L01_ReadStatus(void)
{
uint8_t Status;
/*CSN置低,通信开始*/
NRF24L01_W_CSN(0);
/*交换发送一个字节,通信开始的第一个字节为指令码,空指令*/
/*第一个字节发送任意指令,都可以交换得到状态寄存器的值*/
Status = NRF24L01_SPI_SwapByte(NRF24L01_NOP);
/*CSN置高,通信结束*/
NRF24L01_W_CSN(1);
/*返回状态寄存器的值*/
return Status;
}
/*********************指令实现*/
/*功能函数*********************/
/**
* 函 数:NRF24L01进入掉电模式(CE = 0,PWR_UP = 0)
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_PowerDown(void)
{
uint8_t Config;
/*CE置0,退出收发模式*/
NRF24L01_W_CE(0);
/*读-改-写操作流程,单独修改配置寄存器的某些位而不影响其他位*/
Config = NRF24L01_ReadReg(NRF24L01_CONFIG); //读取配置寄存器
if (Config == 0xFF) {return;} //配置寄存器全为1,出错,退出函数
Config &= ~0x02; //配置寄存器位1(PWR_UP)置0
NRF24L01_WriteReg(NRF24L01_CONFIG, Config); //写回配置寄存器
}
/**
* 函 数:NRF24L01进入待机模式1(CE = 0,PWR_UP = 1)
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_StandbyI(void)
{
uint8_t Config;
/*CE置0,退出收发模式*/
NRF24L01_W_CE(0);
/*读-改-写操作流程,单独修改配置寄存器的某些位而不影响其他位*/
Config = NRF24L01_ReadReg(NRF24L01_CONFIG); //读取配置寄存器
if (Config == 0xFF) {return;} //配置寄存器全为1,出错,退出函数
Config |= 0x02; //配置寄存器位1(PWR_UP)置1
NRF24L01_WriteReg(NRF24L01_CONFIG, Config); //写回配置寄存器
}
/**
* 函 数:NRF24L01进入接收模式(CE = 1,PWR_UP = 1,PRIM_RX = 1)
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_Rx(void)
{
uint8_t Config;
/*CE置0,退出收发模式*/
NRF24L01_W_CE(0);
/*读-改-写操作流程,单独修改配置寄存器的某些位而不影响其他位*/
Config = NRF24L01_ReadReg(NRF24L01_CONFIG); //读取配置寄存器
if (Config == 0xFF) {return;} //配置寄存器全为1,出错,退出函数
Config |= 0x03; //配置寄存器位1(PWR_UP)和位0(PRIM_RX)都置1
NRF24L01_WriteReg(NRF24L01_CONFIG, Config); //写回配置寄存器
/*CE置1,进入收发模式,因为PRIM_RX为1,所以进入接收模式*/
NRF24L01_W_CE(1);
}
/**
* 函 数:NRF24L01进入发送模式(CE = 1,PWR_UP = 1,PRIM_RX = 0)
* 参 数:无
* 返 回 值:无
*/
void NRF24L01_Tx(void)
{
uint8_t Config;
/*CE置0,退出收发模式*/
NRF24L01_W_CE(0);
/*读-改-写操作流程,单独修改配置寄存器的某些位而不影响其他位*/
Config = NRF24L01_ReadReg(NRF24L01_CONFIG); //读取配置寄存器
if (Config == 0xFF) {return;} //配置寄存器全为1,出错,退出函数
Config |= 0x02; //配置寄存器位1(PWR_UP)置1
Config &= ~0x01; //配置寄存器位0(PRIM_RX)置0
NRF24L01_WriteReg(NRF24L01_CONFIG, Config); //写回配置寄存器
/*CE置1,进入收发模式,因为PRIM_RX为0,所以进入发送模式*/
NRF24L01_W_CE(1);
}
/**
* 函 数:NRF24L01初始化
* 参 数:无
* 返 回 值:无
* 说 明:使用前,需要调用此初始化函数
*/
void NRF24L01_Init(void)
{
/*先调用底层的端口初始化*/
NRF24L01_GPIO_Init();
/*初始化配置一系列寄存器,寄存器值的意义需参考手册中的寄存器描述*/
/*以下配置通信双方必须保持一致,否则无法进行通信*/
NRF24L01_WriteReg(NRF24L01_CONFIG, 0x08); //配置寄存器,不屏蔽中断,使能CRC,CRC为1字节,PWR_UP = 0,PRIM_RX = 0
NRF24L01_WriteReg(NRF24L01_EN_AA, 0x3F); //使能自动应答,开启接收通道0~通道5的自动应答
NRF24L01_WriteReg(NRF24L01_EN_RXADDR, 0x01); //使能接收通道,只开启接收通道0
NRF24L01_WriteReg(NRF24L01_SETUP_AW, 0x03); //设置地址宽度,地址宽度为5字节
NRF24L01_WriteReg(NRF24L01_SETUP_RETR, 0x03); //设置自动重传,间隔250us,重传3次
NRF24L01_WriteReg(NRF24L01_RF_CH, 0x02); //射频通道,频率为(2400 + 2)MHz = 2.402GHz
NRF24L01_WriteReg(NRF24L01_RF_SETUP, 0x0E); //射频设置,通信速率为2Mbps,发射功率为0dBm
/*接收通道0的数据包宽度,设置为宏定义NRF24L01_RX_PACKET_WIDTH指定的值*/
NRF24L01_WriteReg(NRF24L01_RX_PW_P0, NRF24L01_RX_PACKET_WIDTH);
/*接收通道0地址,设置为全局数组NRF24L01_RxAddress指定的地址,地址宽度固定为5字节*/
NRF24L01_WriteRegs(NRF24L01_RX_ADDR_P0, NRF24L01_RxAddress, 5);
/*清空Tx FIFO的所有数据*/
NRF24L01_FlushTx();
/*清空Rx FIFO的所有数据*/
NRF24L01_FlushRx();
/*给状态寄存器的位4(MAX_RT)、位5(TX_DS)和位6(RX_DR)写1,清标志位*/
NRF24L01_WriteReg(NRF24L01_STATUS, 0x70);
/*初始化配置完成,芯片默认进入接收模式*/
NRF24L01_Rx();
}
/**
* 函 数:NRF24L01发送数据包
* 参 数:无
* 返 回 值:发送标志位,方便用户了解发送状态
* 1:发送成功,无错误
* 2:达到了最大重发次数仍未收到应答,可能是收发双方配置不一致、接收方不存在、接收FIFO已满或者多个发送数据包碰撞
* 3:状态寄存器的值不合法,可能是设备不存在、断路、短路或者引脚配置不正确
* 4:发送超时,可能是设备未初始化、断路、短路或者引脚配置不正确
* 说 明:调用此函数前,直接修改全局数组NRF24L01_TxAddress和NRF24L01_TxPacket来设置发送的地址和数据
*/
uint8_t NRF24L01_Send(void)
{
uint8_t Status;
uint8_t SendFlag;
uint32_t Timeout;
/*发送地址,设置为全局数组NRF24L01_TxAddress指定的地址,地址宽度固定为5字节*/
NRF24L01_WriteRegs(NRF24L01_TX_ADDR, NRF24L01_TxAddress, 5);
/*接收通道0地址,此处必须也设置为发送地址,用于接收应答*/
NRF24L01_WriteRegs(NRF24L01_RX_ADDR_P0, NRF24L01_TxAddress, 5);
/*写发送有效载荷,写入全局数组NRF24L01_TxPacket指定的数据,数据宽度为NRF24L01_TX_PACKET_WIDTH*/
NRF24L01_WriteTxPayload(NRF24L01_TxPacket, NRF24L01_TX_PACKET_WIDTH);
/*发送的地址和有效载荷写入完成,进入发送模式,开始发送数据*/
NRF24L01_Tx();
/*指定超时时间,即循环读取状态寄存器的次数,具体值可以实测确定*/
Timeout = 10000;
/*循环读取状态寄存器*/
while (1)
{
/*读取状态寄存器,保存至Status变量*/
Status = NRF24L01_ReadStatus();
/*超时计次*/
Timeout --;
if (Timeout == 0) //如果计次减至0
{
SendFlag = 4; //发送超时,置标志位为4
NRF24L01_Init(); //发送出错,重新初始化一次设备,这样有助于设备从错误中恢复正常
break; //跳出循环
}
/*根据状态寄存器的值,判断发送状态*/
if ((Status & 0x30) == 0x30) //状态寄存器位4(MAX_RT)和位5(TX_DS)同时为1
{
SendFlag = 3; //状态寄存器的值不合法,置标志位为3
NRF24L01_Init(); //发送出错,重新初始化一次设备,这样有助于设备从错误中恢复正常
break; //跳出循环
}
else if ((Status & 0x10) == 0x10) //状态寄存器位4(MAX_RT)为1
{
SendFlag = 2; //达到了最大重发次数仍未收到应答,置标志位为2
NRF24L01_Init(); //发送出错,重新初始化一次设备,这样有助于设备从错误中恢复正常
break; //跳出循环
}
else if ((Status & 0x20) == 0x20) //状态寄存器位5(TX_DS)为1
{
SendFlag = 1; //发送成功,无错误,置标志位为1
break; //跳出循环
}
}
/*给状态寄存器的位4(MAX_RT)和位5(TX_DS)写1,清标志位*/
NRF24L01_WriteReg(NRF24L01_STATUS, 0x30);
/*清空Tx FIFO的所有数据*/
NRF24L01_FlushTx();
/*发送完成后,恢复接收通道0原来的地址*/
/*如果发送地址和接收通道0地址设置相同,则可不执行这一句*/
NRF24L01_WriteRegs(NRF24L01_RX_ADDR_P0, NRF24L01_RxAddress, 5);
/*发送完成,芯片恢复为接收模式*/
NRF24L01_Rx();
/*返回发送标志位*/
return SendFlag;
}
/**
* 函 数:NRF24L01接收数据包
* 参 数:无
* 返 回 值:接收标志位,方便用户了解接收状态
* 0:未接收到数据包
* 1:成功接收到一个数据包
* 2:状态寄存器的值不合法,可能是设备不存在、断路、短路或者引脚配置不正确
* 3:设备仍处于掉电模式,可能是设备未初始化、曾经断电过、断路、短路或者引脚配置不正确
* 说 明:如果收到了数据包,则可直接从全局数组NRF24L01_RxPacket取数据
*/
uint8_t NRF24L01_Receive(void)
{
uint8_t Status, Config;
uint8_t ReceiveFlag;
/*读取状态寄存器,保存至Status变量*/
Status = NRF24L01_ReadStatus();
/*读取配置寄存器,保存至Config变量*/
Config = NRF24L01_ReadReg(NRF24L01_CONFIG);
/*根据配置寄存器和状态寄存器的值,判断接收状态*/
if ((Config & 0x02) == 0x00) //配置寄存器位1(PWR_UP)为0
{
ReceiveFlag = 3; //设备仍处于掉电模式,置标志位为3
NRF24L01_Init(); //接收出错,重新初始化一次设备,这样有助于设备从错误中恢复正常
}
else if ((Status & 0x30) == 0x30) //状态寄存器位4(MAX_RT)和位5(TX_DS)同时为1
{
ReceiveFlag = 2; //状态寄存器的值不合法,置标志位为2
NRF24L01_Init(); //接收出错,重新初始化一次设备,这样有助于设备从错误中恢复正常
}
else if ((Status & 0x40) == 0x40) //状态寄存器位6(RX_DR)为1
{
ReceiveFlag = 1; //接收到数据,置标志位为1
/*读接收有效载荷,存放在全局数组NRF24L01_RxPacket中,数据宽度为NRF24L01_RX_PACKET_WIDTH*/
NRF24L01_ReadRxPayload(NRF24L01_RxPacket, NRF24L01_RX_PACKET_WIDTH);
/*给状态寄存器的位6(RX_DR)写1,清标志位*/
NRF24L01_WriteReg(NRF24L01_STATUS, 0x40);
/*清空Rx FIFO的所有数据*/
NRF24L01_FlushRx();
}
else
{
ReceiveFlag = 0; //未接收到数据,置标志位为0
}
/*返回接收标志位*/
return ReceiveFlag;
}
/**
* 函 数:NRF24L01更新接收地址
* 参 数:无
* 返 回 值:无
* 说 明:如果想在运行时动态修改接收地址,则可先向全局数组NRF24L01_RxAddress写入修改的地址
* 然后再调用此函数,使修改的接收地址生效
*/
void NRF24L01_UpdateRxAddress(void)
{
/*接收通道0地址,设置为全局数组NRF24L01_RxAddress指定的地址,地址宽度固定为5字节*/
NRF24L01_WriteRegs(NRF24L01_RX_ADDR_P0, NRF24L01_RxAddress, 5);
}








