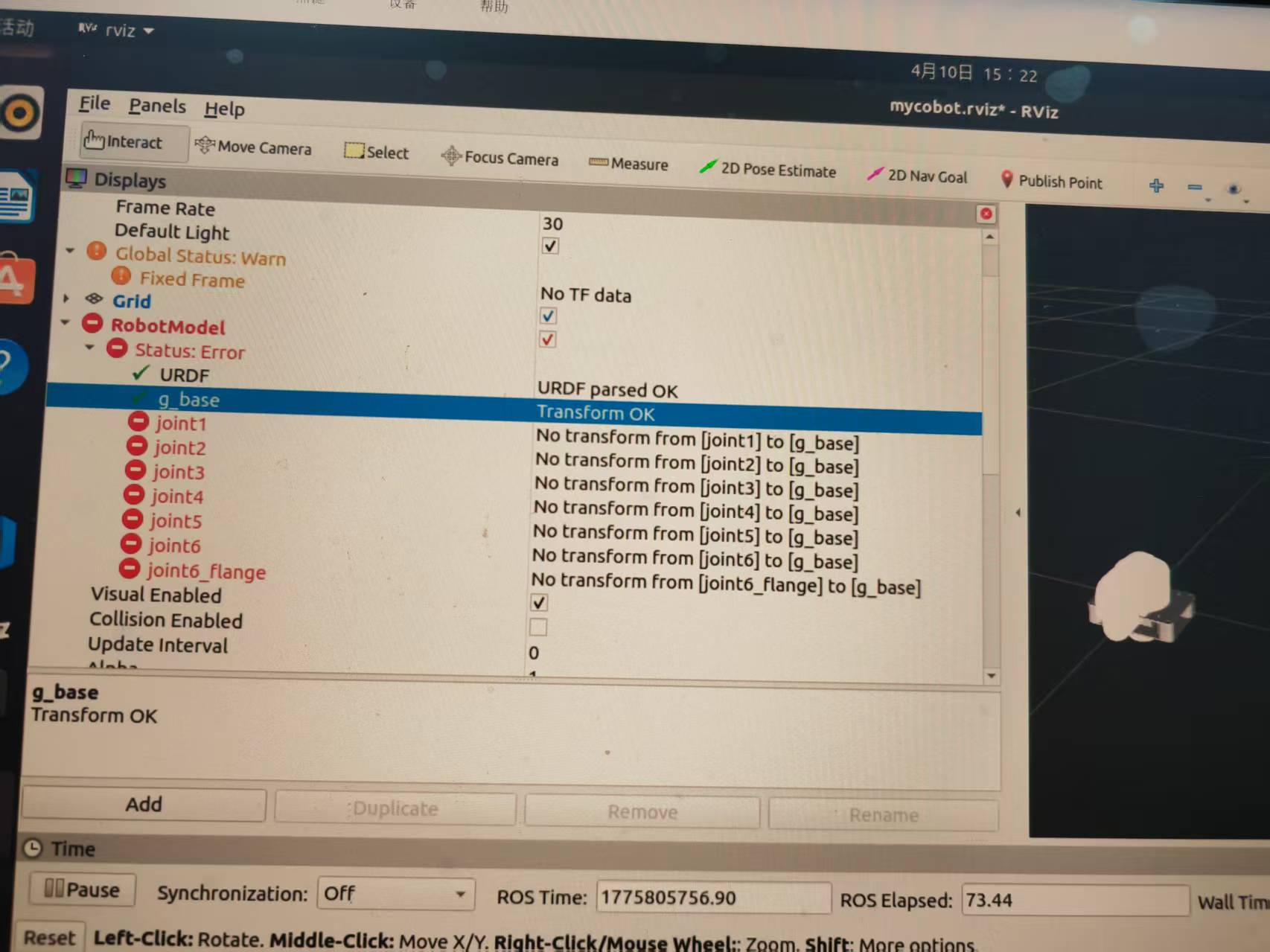
在用ROS开发大象机器人mycobot280中为什么出现下列图片中的情况


在用ROS开发大象机器人mycobot280中为什么出现下列图片中的情况
 分享
分享
下午好🌅🌅🌅
本答案参考通义千问
在使用ROS开发大象机器人 Mycobot 280 时,如果出现你提到的“图片中的情况”,由于无法查看图片,我将基于常见的 Mycobot 280 在ROS开发中可能出现的问题进行分析,并提供详细的解决方案。
ROS_MASTER_URI)。/dev/ttyUSB0不存在)。步骤:
dmesg | grep tty 或 ls /dev/tty* 确认设备是否被识别为 /dev/ttyUSB0 或类似。rosrun serial(serial_node) --port=/dev/ttyUSB0 启动串口通信。关键代码示例(修改后):
# 检查设备是否存在
ls /dev/ttyUSB*
# 启动串口通信(假设使用 mycobot_ros 包)
rosrun mycobot_serial mycobot_serial_node _port:=/dev/ttyUSB0
加粗重点:确保串口端口配置正确,否则所有控制指令都无法发送。
步骤:
rosnode list 查看节点是否启动。rostopic list 查看话题是否发布。rostopic echo /joint_states 查看关节状态是否更新。常见错误提示:
No such node: ...:说明节点未启动。Topic not found:说明话题未发布或订阅错误。加粗重点:ROS节点和话题是通信的基础,若未正常运行,后续功能无法实现。
步骤:
mycobot280.urdf.xacro 文件是否正确。rviz 加载URDF模型,观察机械臂是否显示正常。moveit_config 是否配置了正确的关节限制和碰撞检测。关键代码示例(修改后的 URDF 配置):
<robot name="mycobot280">
<joint name="joint1" type="revolute">
<origin xyz="0 0 0" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<limit lower="-2.5" upper="2.5" velocity="1.0" effort="1.0"/>
</joint>
</robot>
加粗重点:URDF 和 MoveIt 配置错误会导致路径规划失败或运动异常。
步骤:
rosrun image_view image_view image:=/camera/image_raw 查看图像是否正常。launch 文件中正确加载。关键代码示例(启动摄像头):
<launch>
<node name="camera_driver" pkg="usb_cam" type="usb_cam_node" />
<node name="image_view" pkg="image_view" type="image_view" args="image:=/usb_cam/image_raw" />
</launch>
加粗重点:传感器数据异常可能导致视觉识别或避障功能失效。
步骤:
ROS_MASTER_URI 设置正确(例如:http://localhost:11311)。ROS_IP 设置为当前机器的IP地址(特别是多机通信时)。设置命令示例:
export ROS_MASTER_URI=http://localhost:11311
export ROS_IP=192.168.1.100
加粗重点:环境变量配置错误会导致ROS网络通信失败。
| 问题类型 | 原因 | 解决方案 |
|------------------|--------------------------------|----------------------------------------------|
| 关节不响应 | 通信中断、硬件连接问题 | 检查串口、重新连接硬件 |
| ROS节点异常 | 依赖缺失、配置错误 | 重新安装依赖、检查节点配置 |
| 传感器数据异常 | 传感器未连接、驱动未加载 | 检查硬件连接、启动驱动 |
| URDF/MoveIt 错误 | 模型配置错误、路径规划失败 | 检查URDF文件、配置MoveIt |
| 网络通信失败 | 环境变量错误 | 设置 ROS_MASTER_URI 和 ROS_IP |
如果你能提供更具体的错误信息或图片内容,我可以进一步定位问题。希望以上内容对你有所帮助!
分享 创建了问题
4月10日
创建了问题
4月10日


