晚上好🌙🌙🌙
本答案参考通义千问
你目前的系统是 Ubuntu 22.04,使用的是 ROS2 Humble,并且已经搭建好了实物小车。目标是实现 激光雷达(MID360)的实时建图与导航,并结合 超声波传感器进行避障,同时能够保存地图并在后续使用。
你当前的问题是:只能得到点云图,无法保存,并且没有实现真正的建图和导航功能。下面我将从以下几个方面为你提供详细解决方案:
一、问题分析
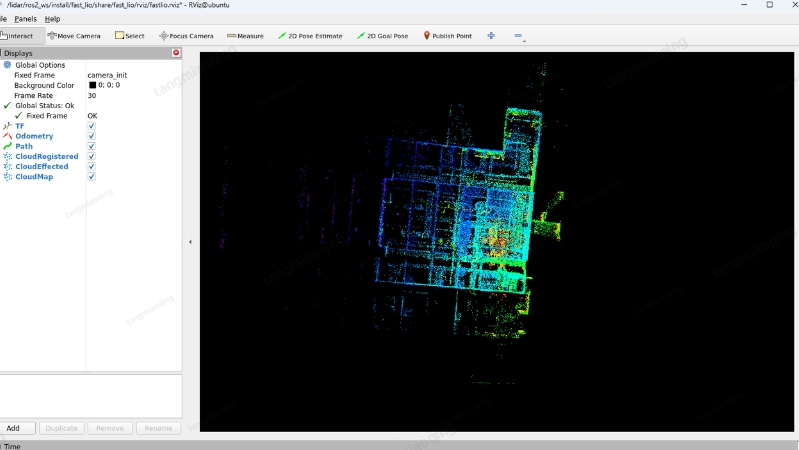
你目前运行了 FAST-LIO 和 Livox 雷达驱动,但只得到了 点云数据,并没有生成地图。这说明你可能混淆了 点云可视化 和 SLAM建图 的概念。
- 点云图 是原始的激光雷达数据,不包含环境信息。
- 建图 是通过 SLAM 算法(如 FAST-LIO 或 Hector SLAM)对点云进行处理,生成地图。
二、解决思路
1. 明确你的目标
你需要完成以下三个核心任务:
- ✅ 激光雷达数据采集(已实现)
- ✅ 基于激光雷达的实时建图(需要调整配置)
- ✅ 地图保存与重新加载
- ✅ 超声波避障模块(可选)
三、具体解决方案
1. 确保 FAST-LIO 正确运行并生成地图
1.1 修改 fast_lio 的配置文件
你使用的配置文件是 mid360.yaml,请确认其是否正确支持 MID360 激光雷达。
# 示例 mid360.yaml 内容
# 参考官方文档或示例配置
如果配置文件中没有指定地图输出路径,请添加如下内容:
map:
map_topic: "/slam/map"
save_map: true
map_file: "/path/to/save/map.pgm"
1.2 保存地图
在运行 ros2 launch fast_lio mapping.launch.py 后,可以通过以下命令保存地图:
ros2 topic echo /slam/map > map_data.txt
或者使用工具如 map_server 来保存为 .pgm 和 .yaml 格式:
ros2 run nav2_map_server map_saver_cli -f /path/to/save/map
注意: 如果你使用的是 FAST-LIO,它本身不直接支持保存地图,建议改用 Hector SLAM 或 cartographer 进行更完善的建图。
2. 使用 Hector SLAM 实现建图
如果你发现 FAST-LIO 不适合你的需求,可以尝试使用 Hector SLAM,它更适合室内建图。
2.1 安装 Hector SLAM
sudo apt install ros-humble-hector-slam
2.2 修改 launch 文件
创建一个 launch 文件,例如 hector_slam_launch.py:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='hector_slam',
executable='hector_slam',
name='hector_slam',
output='screen',
parameters=[
{'use_sim_time': False},
{'scan_topic': '/livox/points'},
{'map_frame': 'map', 'base_frame': 'base_link'}
]
),
Node(
package='rviz2',
executable='rviz2',
name='rviz',
arguments=['-d', '/path/to/your/rviz_config.rviz']
)
])
2.3 保存地图
运行后,在 RVIZ 中查看地图,然后使用以下命令保存地图:
ros2 run nav2_map_server map_saver_cli -f /path/to/save/map
3. 超声波避障模块(可选)
你可以使用 Ultrasonic Sensor 数据进行避障,结合 ROS2 的 move_base 或 navigation stack 实现自动避障。
3.1 示例代码(Python)
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Range
class ObstacleAvoidance(Node):
def __init__(self):
super().__init__('obstacle_avoidance')
self.subscription = self.create_subscription(
Range,
'/ultrasonic',
self.listener_callback,
10)
self.publisher = self.create_publisher(String, '/cmd_vel', 10)
def listener_callback(self, msg):
if msg.range < 0.5: # 如果距离小于0.5米
self.get_logger().info("Obstacle detected! Stopping...")
# 发送停止指令
self.publisher.publish("stop")
else:
self.get_logger().info("No obstacle. Moving forward.")
# 发送前进指令
self.publisher.publish("forward")
def main(args=None):
rclpy.init(args=args)
node = ObstacleAvoidance()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
4. 地图导入与重用
要再次使用地图,可以使用 nav2_map_server 加载 .pgm 和 .yaml 文件:
ros2 run nav2_map_server map_server --ros-args -p use_sim_time:=false -p map:=/path/to/map.yaml
四、总结
| 任务 | 解决方案 |
|------|----------|
| 实时建图 | 使用 Hector SLAM 或 FAST-LIO,确保配置正确 |
| 保存地图 | 使用 map_saver_cli 命令保存为 .pgm 和 .yaml |
| 导入地图 | 使用 nav2_map_server 加载地图 |
| 超声波避障 | 使用 Range 消息监听距离,控制小车动作 |
五、推荐流程
- 启动雷达驱动(
livox_ros_driver2) - 启动 SLAM 模块(
hector_slam 或 fast_lio) - 在 RVIZ 中观察地图
- 保存地图
- 导入地图用于导航
如果你希望我帮你修改或编写完整的 launch 文件、配置文件或避障代码,请告诉我,我可以进一步协助!😊