急需PIC16F84的伺服代码,需要控制4个舵机连接端口,急需PIC16F84的伺服代码,需要控制4个舵机连接端口



2条回答 默认 最新
- 普通网友 2017-03-25 07:17关注
之前做过,这是部分代码:
function varargout = servo_control(varargin)% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @servo_control_OpeningFcn, ...
'gui_OutputFcn', @servo_control_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
endif nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT%*-*-FUNCI DE CONDICIONES INICIALES*-*-*
function servo_control_OpeningFcn(hObject, eventdata, handles, varargin)
%*-*-INICIO DE CONDICIONES INICIALES*-*-*
%*-*-CIGO para centrar la interfaz
movegui(hObject,'center')
%*-*-FIN de CIGO para centrar la interfaz
%*-*-Limpiar la pantalla y mostrar mensaje*-*-*-*-
clc; disp('Programa Ejecutdose')
%*-*-Configuraci del puerto serial*-*-*-*-*-*-*-*
handles.SerPIC = serial('COM1');%Seleccionar puerto COM1
set(handles.SerPIC,'BaudRate',2400);%Velocidad 2400 baudios
set(handles.SerPIC,'DataBits',8);%8 bits de datos
set(handles.SerPIC,'Parity','none');%Sin control de paridad
set(handles.SerPIC,'StopBits',1);%Un bit de parada
set(handles.SerPIC,'FlowControl','none');%Sin control de flujo
fopen(handles.SerPIC); %--Abrir el puerto serial
%********----------***************-----------************----------*
%*-*-FIN DE CONDICIONES INICIALES*-*-*% Choose default command line output for servo_control
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);% --- Outputs from this function are returned to the command line.
function varargout = servo_control_OutputFcn(hObject, eventdata, handles)
varargout{1} = handles.output;%********PROGRAMACIPRINCIPAL*-*-*-*-*-*-*-
%CONTIENE:
%CONTROL DE LOS SLIDER QUE ENVIAN DATOS SERIALES
%AL MICROCONTROLADOR PIC 16F628A% ----------- MOVIMIENTO DE LA MU袳CA-PIN 4-------------------
function motor_uno_Callback(hObject, eventdata, handles)
set(handles.motor_uno,'Enable','inactive')
val_s=round(get(hObject,'Value'));
grados=round((val_s*0.9)-45);
set(handles.pos_1,'String',grados);
fprintf(handles.SerPIC,'%c',[char(4) char(val_s)]);
pause(0.7)
set(handles.motor_uno,'Enable','on')
%----------------------------------------------------% ----------- MOVIMIENTO DEL CODO-PIN 2-------------------.
function motor_dos_Callback(hObject, eventdata, handles)
%Slider que controla el motor del codo
set(handles.motor_dos,'Enable','inactive')
maxi=get(hObject,'Max');%Tomar valor mimo
mini=get(hObject,'Min');%Tomar valor mimo
val_s=round(get(hObject,'Value'));
val_s=maxi-val_s+mini;%Inverside movimiento
grados=round((val_s*0.9)-45);
set(handles.pos_2,'String',grados);
fprintf(handles.SerPIC,'%c',[char(2) char(val_s)]);%
pause(0.7)
set(handles.motor_dos,'Enable','on')
%---------------------------------------------------------------% ----------- MOVIMIENTO DE GIRO -PIN 3-------------------.
function motor_tres_Callback(hObject, eventdata, handles)
%Slider que controla el motor tres (codo)
set(handles.motor_tres,'Enable','inactive')
val_s=round(get(hObject,'Value'));
grados=round((val_s*0.9)-45);
set(handles.pos_3,'String',grados);
fprintf(handles.SerPIC,'%c',[char(3) char(val_s)]);%
pause(0.7)
set(handles.motor_tres,'Enable','on')
%------------------------------------------------------------------% ----------- MOVIMIENTO DE LA BASE-PIN 1-------------------
function motor_cuatro_Callback(hObject, eventdata, handles)
set(handles.motor_cuatro,'Enable','inactive')
maxi=get(hObject,'Max');%Tomar valor mimo
mini=get(hObject,'Min');%Tomar valor mimo
val_s=round(get(hObject,'Value'));
val_s=maxi-val_s+mini;%Inverside movimiento
grados=round((val_s*0.9)-45);%Conversia grados
set(handles.pos_4,'String',grados);
fprintf(handles.SerPIC,'%c',[char(1) char(val_s)]);%
pause(0.7)
set(handles.motor_cuatro,'Enable','on')
%------------------------------------------------------------------% --- Executes on slider movement.
function motor_cinco_Callback(hObject, eventdata, handles)
%Slider que controla el motor cinco (pinza)
set(handles.motor_cinco,'Enable','inactive')
val_s=round(get(hObject,'Value'));
set(handles.pos_5,'String',val_s);
fprintf(handles.SerPIC,'%c',[char(5) char(val_s)]);%
pause(0.7)
set(handles.motor_cinco,'Enable','on')
%-------------------------------------% --- Executes during object deletion, before destroying properties.
function figure1_DeleteFcn(hObject, eventdata, handles)
%*-*-Cierra el puerto serial al cerrar la interfaz grica*-*-*-
clc
try
fclose(handles.SerPIC) %--CIERRA EL PUERTO COM
delete(handles.SerPIC)
clear handles.SerPIC
disp('Puerto Serial Cerrado')
catch
disp('Error al cerrar el puerto serial')
end还有设计图
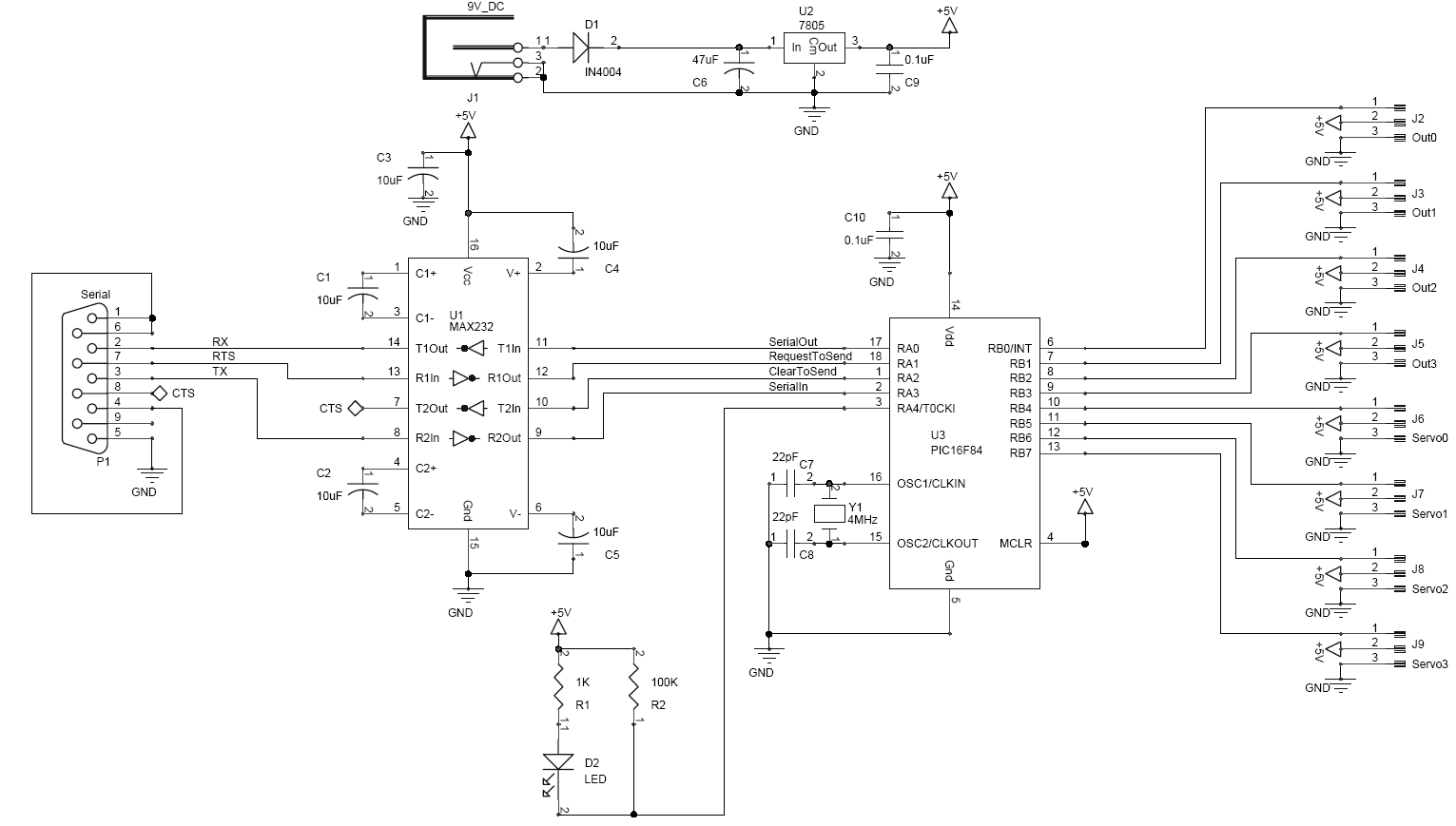
还有一些相关的资料可以联系我本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
分享
- 2017-03-23 06:15回答 2 已采纳 之前做过,这是部分代码: function varargout = servo_control(varargin) % Begin initialization code - DO NOT E
- 2017-09-08 11:29回答 1 已采纳 没听说代码用抄的,你的书没有配套源代码么?
- 2018-05-05 19:49回答 2 已采纳 此程序关键在于以下几点: **多进程并行** MPI_Comm_size与MPI_Comm_rank即创建了numprocs个相同的进程,但是给他们赋予了不同的id **Map-Re
- 2020-07-26 20:51本文以PIC16F1508单片机为控制核心,利用其PWM模块、CLC模块、TMR1模块的组合进行脉宽调制和速度检测,使用开关磁阻电机专用驱动功率芯片FCAS20DN60BB作为驱动,实现对开关磁阻电动机的伺服控制。
- 2021-03-22 15:27回答 4 已采纳 ok,搞定了; 引发错误的地方在于:傅里叶逆变换,实数部分和虚数部分都需要除N,你只给实数部分除了N,一维数据没有问题是因为,你的一维数据全是实数,逆变换后虚数部分为0,所以不影响;而二维傅里叶变换
- 2023-01-26 14:56回答 1 已采纳 回答不易,求求您采纳点赞哦 有几件事可能会导致移动缓慢。 首先要检查的是移动速度是否由 Unity 的 Time.timeScale 值缩放。该值可用于减慢或加快所有游戏中的物理和动画。确保将 T
- 2021-07-19 10:27回答 1 已采纳 show是显示图像,你这个是直线怎么show?数据结构都不一样
- 2021-06-01 17:58使用 MATLAB 和 PIC 16F628A 控制伺服电机
- 2022-10-23 22:47回答 1 已采纳 看看这个地方的设置还是默认设置吗? 看描述是Gradle失败了,可以参考下这篇文章:Unity 之 解决2019之后的版本打apk卡到Building Gradle project问题_陈言必行的博
- 2023-02-11 11:31回答 4 已采纳 望采纳。。 自定义view组件,在预览模式需要禁止绘制等操作。 可以使用View.isInEditMode(),来判断当前是不是处于编辑器的预览模式,是预览模式,不执行自定义view里面的代码。 你在
- 2022-11-15 20:52回答 2 已采纳 我把16改成32就可以输出图片了,为什么?
- 2021-01-20 03:14直流电动机结构简单,工作稳定可靠,较易实现伺服控制。... 1 直流电动机伺服系统组成 直流电动机伺服系统主要包括控制器PIC16F1508、光电隔离电路、驱动电路、速度检测与电平转换电路,如图1所示。 图
- 2017-03-23 15:46回答 3 已采纳 double比float精度高,有效位不同
- 2020-10-16 08:20直流电动机结构简单,工作稳定可靠,较易实现伺服控制。... 1 直流电动机伺服系统组成 直流电动机伺服系统主要包括控制器PIC16F1508、光电隔离电路、驱动电路、速度检测与电平转换电路,如图1所示。
- 2021-05-30 22:203)外部接口功能有助于设置一个串行端口对象,该对象将适当的输出发送到控制 RC 伺服和直流电机的微控制器(在本例中为 PIC16F690)。 4) PIC 单片机的 C 代码可根据要求提供。 5) 此代码对想要在项目中使用图像...
- 2019-02-26 22:21woshi_ziyu的博客 旋转编码器(Rotary Encoder)是一种帮助用户与系统交互的输入设备。它看起来更像是一个无线电电位器,但它输出一系列脉冲,使其应用独特。...我们还将它连接到PIC单片机PIC16F877A,并通过旋转编码器控制整数值...
- 2021-08-06 13:21weixin_39878646的博客 KEB变频器/keb伺服技术/冷却技术/供给和再生单元/通讯/电磁兼容技术/电子组件/磁技术/齿轮和电机三十多年来,KEB一直是高效传动与控制系统领域的先导者。企业多年以来持续强劲的发展,源于科比不断创新的产品研发...
- 2019-08-25 15:32matlab开发-SERVOMOTORCONTROL。用MATLAB和PIC16F628A控制伺服电机
- 2021-10-09 21:22看个人资料的博客 其中有基于单片机设计的数字示波器、倒车雷达、电子密码锁、智能家居、停车场管理系统、万年历、智能插座等不同方向的典型设计实例,每个实例都提供了设计报告、源代码、电路图等全部设计资料,这些设计资料有利于...
- 没有解决我的问题, 去提问



悬赏问题
- ¥15 Python爬取指定微博话题下的内容,保存为txt
- ¥15 vue2登录调用后端接口如何实现
- ¥65 永磁型步进电机PID算法
- ¥15 sqlite 附加(attach database)加密数据库时,返回26是什么原因呢?
- ¥88 找成都本地经验丰富懂小程序开发的技术大咖
- ¥15 如何处理复杂数据表格的除法运算
- ¥15 如何用stc8h1k08的片子做485数据透传的功能?(关键词-串口)
- ¥15 有兄弟姐妹会用word插图功能制作类似citespace的图片吗?
- ¥15 latex怎么处理论文引理引用参考文献
- ¥15 请教:如何用postman调用本地虚拟机区块链接上的合约?