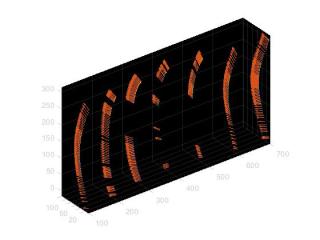
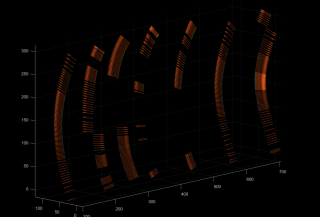
MATLAB画出点云中一下点的法向量之后,向量朝向不一致该如何解决,想让向量箭头都朝左边指,下面是我画出的图:
下面是我的代码:
(其中p.txt和q.txt两个文件我上传到了百度网盘:
链接:https://pan.baidu.com/s/1RSkgnOPen9C-Kvx_YxL45g
提取码:p2q2)
load q.txt
load p.txt
%MYNORMALVECTOR 采用PCA算法求取交点矩阵的每个点的法向量。
%Input:
% q是Nx3的矩阵,包含交点的三维坐标信息[X,Y,Z]。
% p是Nx3的矩阵,包含点云的三维坐标信息[X,Y,Z]。
%Output:
% n是Nx3的矩阵,对应q中每一点的单位法向量。
N = size(q,1);
n = zeros(N,3); % 存放法线的矩阵
% 寻找每个点K近邻的索引
k = 200; % k近邻
[NeiborIndex,~] = knnsearch(p,q,'Distance','euclidean','NSMethod','kdtree','K',k);
for i=1:N
% 当前点邻域点集的索引
IndexOfCurrentNeibors = NeiborIndex(i,:);
% 当前点邻域点集
CurrentNeighbors = p(IndexOfCurrentNeibors,:);
PtCent = mean(CurrentNeighbors); %得到局部点云平均值,便于计算法向量长度和方向
% PCA法计算法向量
B = CurrentNeighbors - repmat(PtCent,k,1); % 去中心化点集矩阵
PtCov = transpose(B)*B; %协方差矩阵
% 求特征值、特征向量。
% D是对应的特征值对角矩阵,V是特征向量
% (因为协方差矩阵为实对称矩阵,故特征向量为单位正交向量)
[V,D] = eig(PtCov);
% d0为最小特征值 idx为特征值的列数索引。
[~, idx] = min(diag(D)); % diag():创建对角矩阵或获取矩阵的对角元素
n(i,:) = V(:,idx)'; % 最小特征值对应的特征向量为法矢,即单位法向量
% 朝向统一
n1 = n(i,:);
n2 = q(i,:);
if dot(n1,n2)<0 % 如果这个向量与法向量的数量积为负数(反向)
n(i,:) = -n(i,:); % 法向量取反向
end
end
ptCloud = pointCloud(q);
figure()
pcshow(ptCloud);
hold on
quiver3(q(:,1),q(:,2),q(:,3),n(:,1),n(:,2),n(:,3));