有一双轮差速驱动的方形小车,车身与直边平行时如何让它沿着直边行走过程中慢慢逼近直边,最终以离直边一定距离时
双轮速度恒定沿直边做直线运动。(小车主要依靠前后两个测距传感器实时测量车身距离边的距离)
求解决思路和公式~
如何通过改变小车左右轮速度让小车逼近直边呢?求各位指点



双轮速度恒定沿直边做直线运动。(小车主要依靠前后两个测距传感器实时测量车身距离边的距离)
求解决思路和公式~
如何通过改变小车左右轮速度让小车逼近直边呢?求各位指点
 分享
分享
这其实还是有点复杂了,先说一下纯数学方面的思路:
1、根据两个超声波传感器数据可以确定车辆与边的距离,两个传感器测距结果相同,则车与边平行
2、楼主的意图是在平行的情况下去接近边,加入边在左侧,那么就是车头左偏向前行,车就会逐渐接近边
3、下一个问题就是车头左偏的幅度的控制,以及什么时候开始回调,这里应该会涉及到一个车辆与边的距离的计算,如图所示:
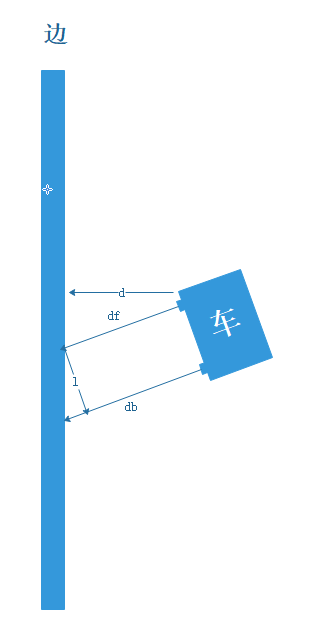
有这4个数据,前后超声波传感器测量结果df,db,超声波传感器安装距离l(可测,固定),车头距边的距离d,根据df、db、l可以计算出车辆倾角θ,再结合df就可以计算出d,可以通过d的大小来控制车辆倾角的大小,比如d比较大的时候,θ可以通过右轮加速(或左轮减速)增大一些,当d越来越接近需要的值的时候,就要开始减小θ,这个地方可以通过pid来控制,如果不通过pid控制可以参照下一条
4、假设两个车轮速度是稳定可调可测量,且地面不打滑,那么就可以精确的计算出车辆在转弯时当前倾角θ,当前车头与边的距离d与右转θ度以后的车头与边的距离,以这个为基础,我们就可以倒推出车辆位姿与转向后的距离关系,举例来说就是假设我以30度倾角靠近边,那么当车头距边多远的距离时进行原地转向,转到平行然后直线向前,这个距离是可计算的
5、以上是纯理想状态下的情况真实状态下需要考虑的是车轮电机的差异性,需要对车轮进行校准,需要达到给定走直线的命令就真的能基本走直线,另外还有地面因素,如果车轮打滑严重,也会影响控制效果
分享  系统已结题
4月28日
系统已结题
4月28日 已采纳回答
4月20日
修改了问题
4月20日
赞助了问题酬金10元
4月20日
已采纳回答
4月20日
修改了问题
4月20日
赞助了问题酬金10元
4月20日



