
机器人的编队与避障 仿真,机器人在二维平面运动,有 x、y坐标 和 “方向” 三个位置参数,机器人还有大小要求(含有长宽两个已知参数)。
机器人每个时刻的x、y位置参数都已知,方向就是运动方向,障碍物也设定好了。根据这5个参数和障碍物 ,画机器人的运动轨迹图。
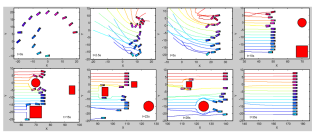
目标图的截图,观看顺序为
1 2 3 4
5 6 7 8

机器人的编队与避障 仿真,机器人在二维平面运动,有 x、y坐标 和 “方向” 三个位置参数,机器人还有大小要求(含有长宽两个已知参数)。
机器人每个时刻的x、y位置参数都已知,方向就是运动方向,障碍物也设定好了。根据这5个参数和障碍物 ,画机器人的运动轨迹图。
目标图的截图,观看顺序为
1 2 3 4
5 6 7 8
 分享
分享
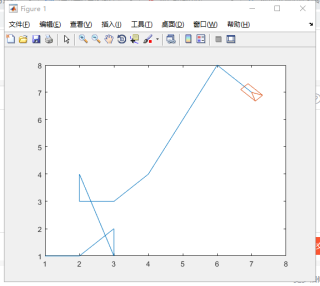
pos=[ 1 1;2 1;3 2;3 1; 2 4;2 3; 3 3;4 4;6 8;7 7];
x=pos(:,1);
y=pos(:,2);
l=length(x);
plot(x,y);
k=atan((y(l)-y(l-1))/(x(l)-x(l-1)));
w=0.3;
h=0.15;
x1=-w;
y1=-h;
x2=-w;
y2=h;
x3=w;
y3=-h;
x4=w;
y4=h;
x11=cos(k)*x1-sin(k)*y1+x(l);
y11=sin(k)*x1+cos(k)*y1+y(l);
x12=cos(k)*x2-sin(k)*y2+x(l);
y12=sin(k)*x2+cos(k)*y2+y(l);
x13=cos(k)*x3-sin(k)*y3+x(l);
y13=sin(k)*x3+cos(k)*y3+y(l);
x14=cos(k)*x4-sin(k)*y4+x(l);
y14=sin(k)*x4+cos(k)*y4+y(l);
hold on;
plot([x14,x13,x11,x12,x14,x(l),x13],[y14,y13,y11,y12,y14,y(l),y13]);
 系统已结题
5月28日
系统已结题
5月28日 已采纳回答
5月20日
修改了问题
5月16日
修改了问题
5月16日
已采纳回答
5月20日
修改了问题
5月16日
修改了问题
5月16日



