构建多远线性回归模型的时候报错了 如图。
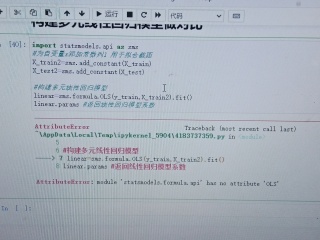
怎么修改这个错误
谢谢各位解答

构建多远线性回归模型的时候报错了 如图。
怎么修改这个错误
谢谢各位解答
 分享
分享
该回答引用GPTᴼᴾᴱᴺᴬᴵ
根据你提供的代码和错误信息,很可能是你拼写了错误的变量名或模块名。可以检查以下几个方面:
以下是一个正确的多元线性回归模型构建的例子:
import numpy as np
import statsmodels.api as sm
# 创建数据
X = np.random.rand(100, 3)
y = X.dot([1, 2, 3]) + np.random.randn(100) * 0.5
# 添加常数列1
X = sm.add_constant(X)
# 将数据集分为训练集和测试集
X_train, X_test = X[:80], X[80:]
y_train, y_test = y[:80], y[80:]
# 拟合模型
model = sm.OLS(y_train, X_train).fit()
# 查看模型系数
print(model.params)
该例子创建了一个包含3个特征的数据集,使用add_constant函数添加了常数列1,将数据集分为训练集和测试集,然后使用OLS函数拟合了一个多元线性回归模型,并查看了模型的系数。
分享 系统已结题
3月17日
系统已结题
3月17日 已采纳回答
3月9日
创建了问题
3月9日
已采纳回答
3月9日
创建了问题
3月9日




