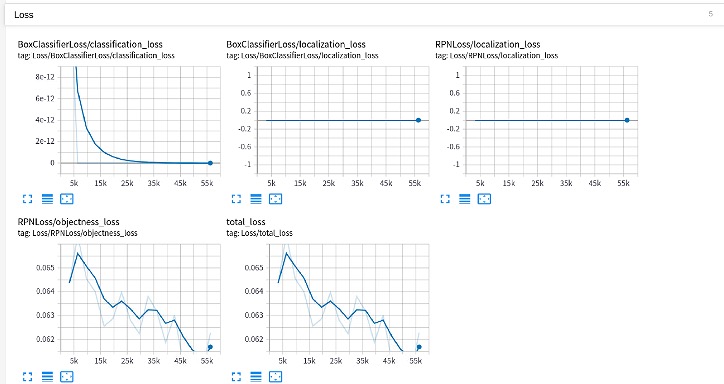
使用Tensorflow object detection api 训练自己的数据 map 一直是-1.loss一直也很低。
结果是这样的: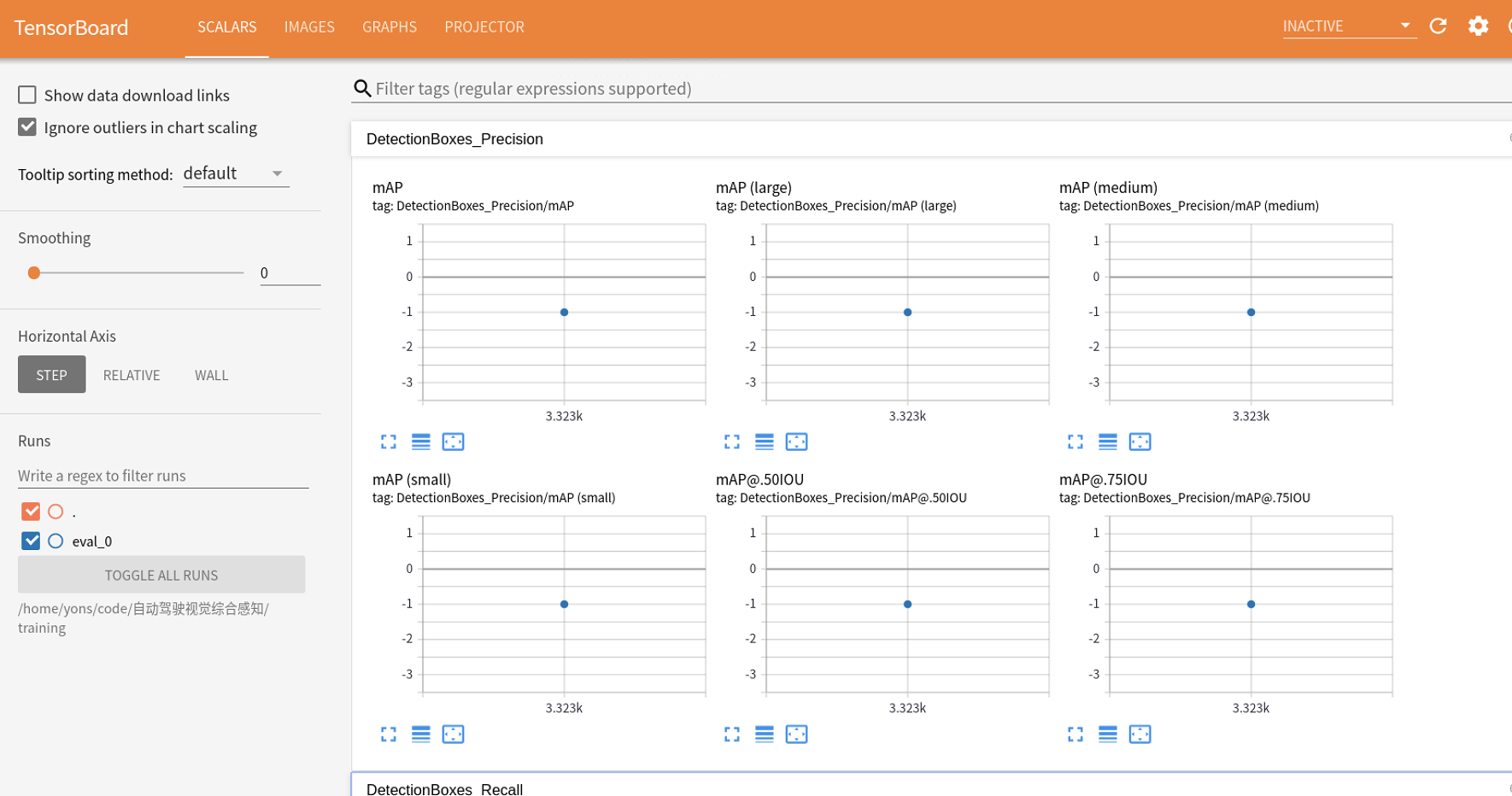
loss:
使用的模型是:model zoo的这个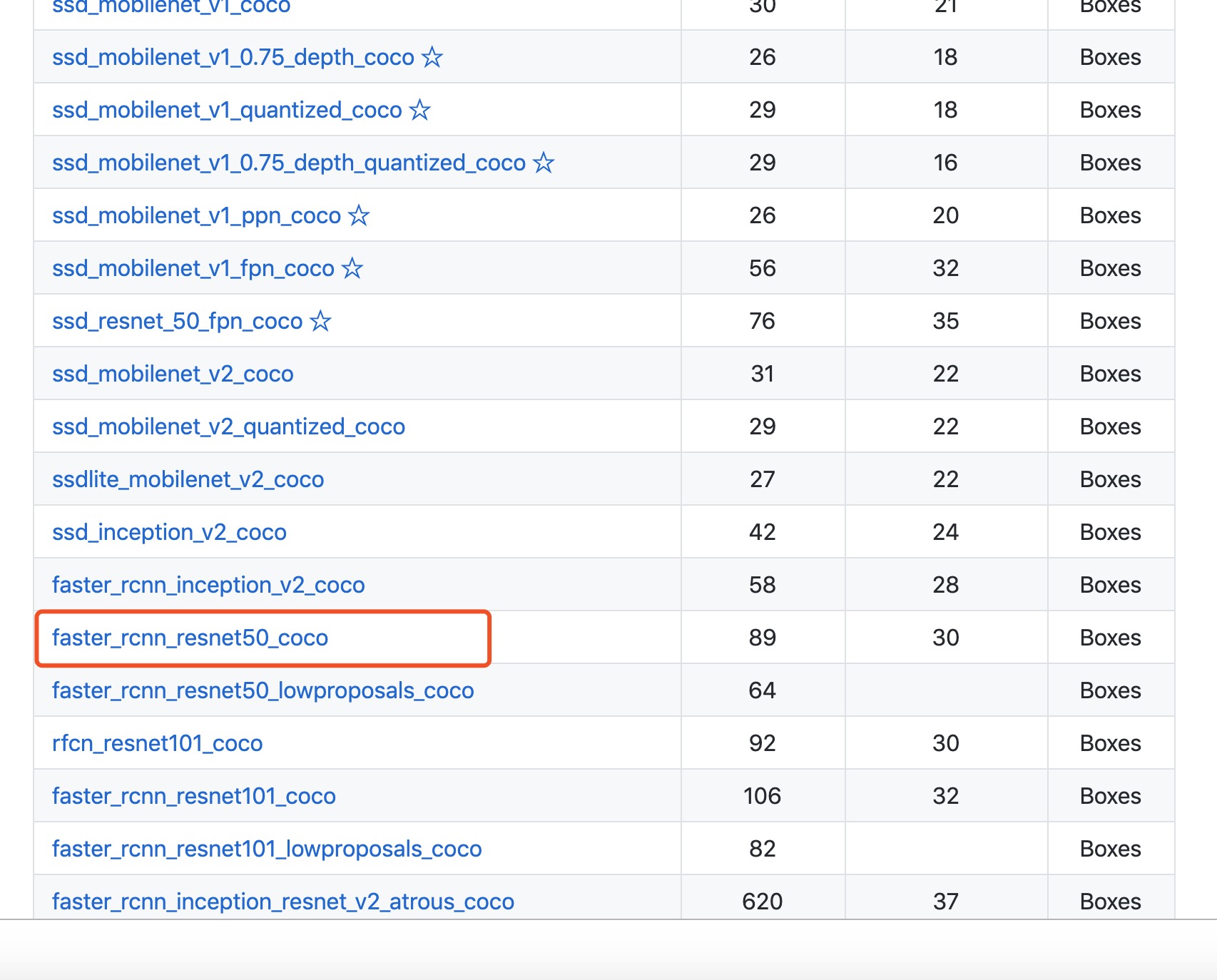
piplineConfig 如下:
model {
faster_rcnn {
num_classes: 25
image_resizer {
keep_aspect_ratio_resizer {
min_dimension: 720
max_dimension: 1280
}
}
feature_extractor {
type: "faster_rcnn_resnet50"
first_stage_features_stride: 16
}
first_stage_anchor_generator {
grid_anchor_generator {
height_stride: 16
width_stride: 16
scales: 0.25
scales: 0.5
scales: 1.0
scales: 2.0
aspect_ratios: 0.5
aspect_ratios: 1.0
aspect_ratios: 2.0
}
}
first_stage_box_predictor_conv_hyperparams {
op: CONV
regularizer {
l2_regularizer {
weight: 0.0
}
}
initializer {
truncated_normal_initializer {
stddev: 0.00999999977648
}
}
}
first_stage_nms_score_threshold: 0.0
first_stage_nms_iou_threshold: 0.699999988079
first_stage_max_proposals: 100
first_stage_localization_loss_weight: 2.0
first_stage_objectness_loss_weight: 1.0
initial_crop_size: 14
maxpool_kernel_size: 2
maxpool_stride: 2
second_stage_box_predictor {
mask_rcnn_box_predictor {
fc_hyperparams {
op: FC
regularizer {
l2_regularizer {
weight: 0.0
}
}
initializer {
variance_scaling_initializer {
factor: 1.0
uniform: true
mode: FAN_AVG
}
}
}
use_dropout: false
dropout_keep_probability: 1.0
}
}
second_stage_post_processing {
batch_non_max_suppression {
score_threshold: 0.300000011921
iou_threshold: 0.600000023842
max_detections_per_class: 100
max_total_detections: 100
}
score_converter: SOFTMAX
}
second_stage_localization_loss_weight: 2.0
second_stage_classification_loss_weight: 1.0
}
}
train_config {
batch_size: 1
data_augmentation_options {
random_horizontal_flip {
}
}
optimizer {
momentum_optimizer {
learning_rate {
manual_step_learning_rate {
initial_learning_rate: 0.000300000014249
schedule {
step: 900000
learning_rate: 2.99999992421e-05
}
schedule {
step: 1200000
learning_rate: 3.00000010611e-06
}
}
}
momentum_optimizer_value: 0.899999976158
}
use_moving_average: false
}
gradient_clipping_by_norm: 10.0
fine_tune_checkpoint: "/home/yons/code/自动驾驶视觉综合感知/faster_rcnn_resnet50_coco_2018_01_28/model.ckpt"
from_detection_checkpoint: true
num_steps: 200000
}
train_input_reader {
label_map_path: "/home/yons/code/自动驾驶视觉综合感知/pascal_label_map.pbtxt"
tf_record_input_reader {
input_path: "/home/yons/data/自动驾驶视觉综合感知/train_dataset/tfRecord/train/coco_train.record"
}
}
eval_config {
num_examples: 200
max_evals: 10
use_moving_averages: false
metrics_set: "coco_detection_metrics"
}
eval_input_reader {
label_map_path: "/home/yons/code/自动驾驶视觉综合感知/pascal_label_map.pbtxt"
shuffle: false
num_readers: 1
tf_record_input_reader {
input_path: "/home/yons/data/自动驾驶视觉综合感知/train_dataset/tfRecord/val/coco_val.record"
}
}
label_map配置:
item {
id: 1
name: 'red'
}
item {
id: 2
name: 'green'
}
item {
id: 3
name: 'yellow'
}
item {
id: 4
name: 'red_left'
}
item {
id: 5
name: 'red_right'
}
item {
id: 6
name: 'yellow_left'
}
item {
id: 7
name: 'yellow_right'
}
item {
id: 8
name: 'green_left'
}
item {
id: 9
name: 'green_right'
}
item {
id: 10
name: 'red_forward'
}
item {
id: 11
name: 'green_forward'
}
item {
id: 12
name: 'yellow_forward'
}
item {
id:13
name: 'horizon_red'
}
item {
id: 14
name: 'horizon_green'
}
item {
id: 15
name: 'horizon_yellow'
}
item {
id: 16
name: 'off'
}
item {
id: 17
name: 'traffic_sign'
}
item {
id: 18
name: 'car'
}
item {
id: 19
name: 'motor'
}
item {
id: 20
name: 'bike'
}
item {
id: 21
name: 'bus'
}
item {
id: 22
name: 'truck'
}
item {
id: 23
name: 'suv'
}
item {
id: 24
name: 'express'
}
item {
id: 25
name: 'person'
}
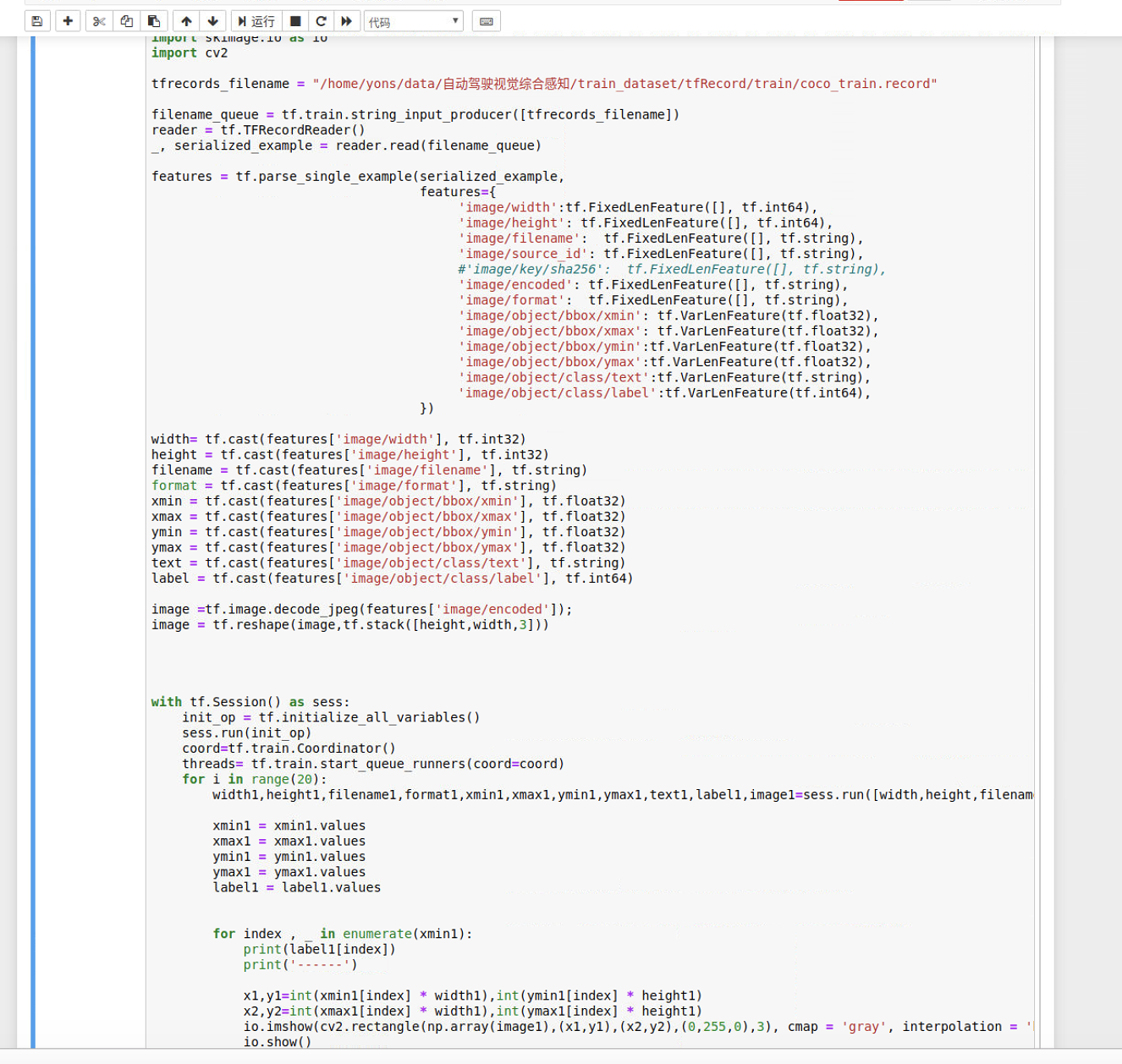
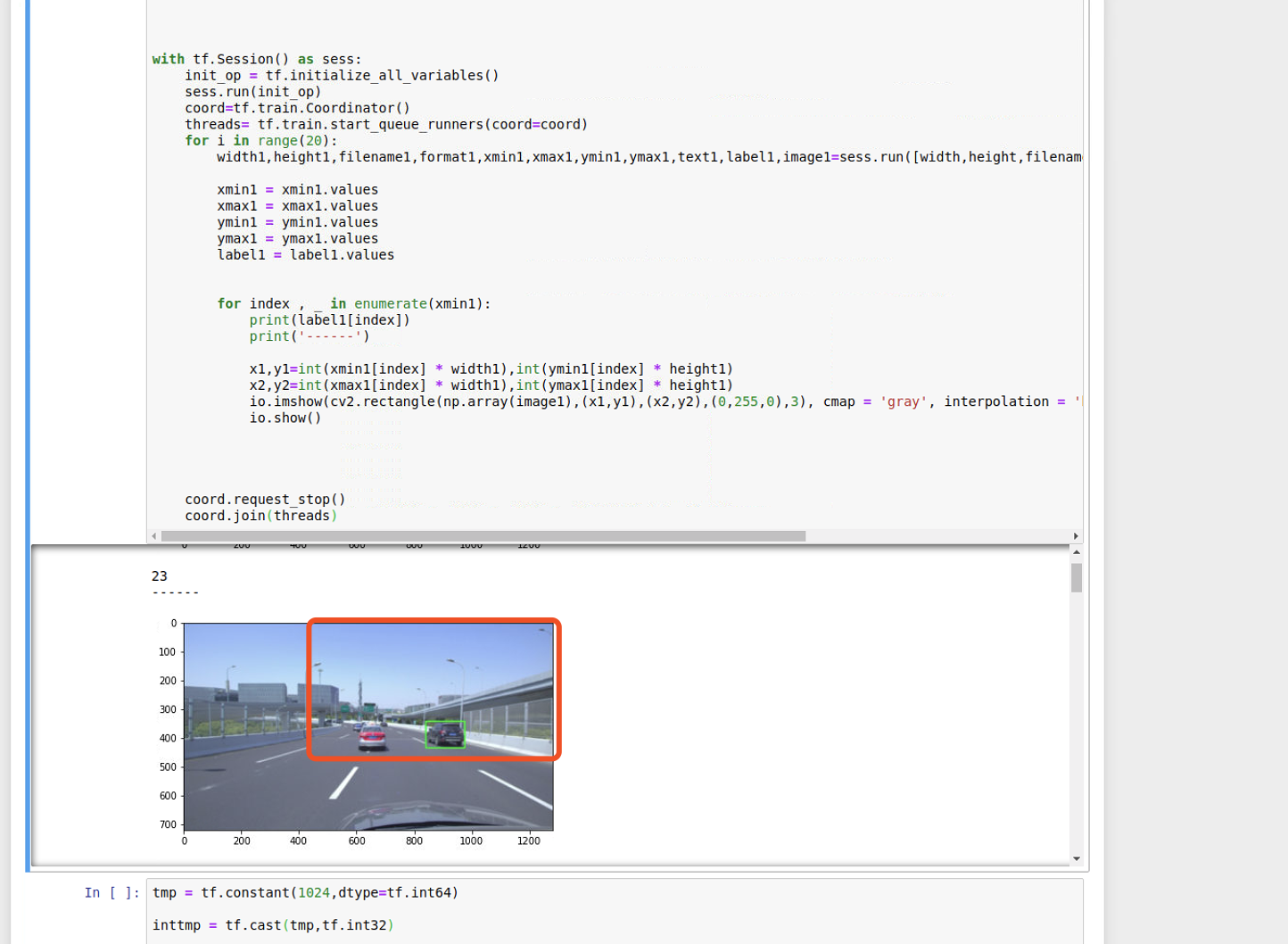
自己解析数据tfrecord: