
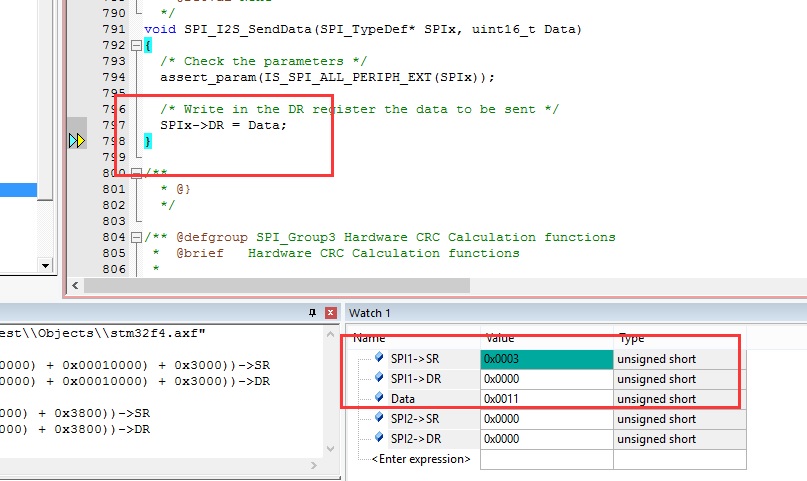
如图寄存器状态,不知道怎么回事,网上也搜不到类似的问题>.<;;
理论上,执行 SPIx->DR = Data;后SPI的SR寄存器应该变为SPIx->SR=0x0000(我的所有脚都悬空),但是结果却是SPIx->SR=0x0003,而且DR的值不变任然是SPIx->DR=0x0000。
不知道怎么回事啊,小弟接触arm没多久,谢谢啦!
下面是部分代码,SPI初始化和main函数。
//main.c
SPI2Init();
STM_EVAL_LEDInit(LED4);
STM_EVAL_LEDInit(LED5);
u32 temp=0;
STM_EVAL_LEDToggle(LED4);
while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE));
SPI_I2S_SendData(SPI1,0x11);
temp=0xfffff;
while(temp) {temp--;}
temp=0;
//SPI1Init.c
void SPI1Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
// Enable the SPI periph
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
// Enable SCK, MOSI and MISO GPIO clocks
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);
// Enable CS GPIO clock
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI1);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOB,&GPIO_InitStructure);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
//Configure GPIO PIN for Lis Chip select
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//Deselect : Chip Select high
GPIO_SetBits(GPIOA, GPIO_Pin_15);
}





