
ROS新手一枚,现在想改变move_base的全局规划器和局部规划器,现在是默认的,是应该怎么改变?尝试了从move_base.launch文件中指定规划器名称,但好像不太对,还是应该修改navigation中move_base.cpp文件啊,有些迷惑。

ROS新手一枚,现在想改变move_base的全局规划器和局部规划器,现在是默认的,是应该怎么改变?尝试了从move_base.launch文件中指定规划器名称,但好像不太对,还是应该修改navigation中move_base.cpp文件啊,有些迷惑。
 分享
分享
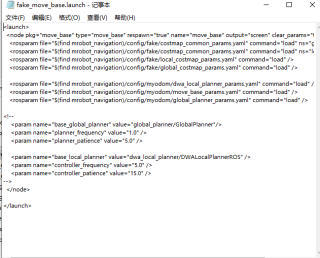
修改规划器名称,如果有一些参数可以给定或者写一个yaml文件。具体参数可以在wiki上找到。
分享


