
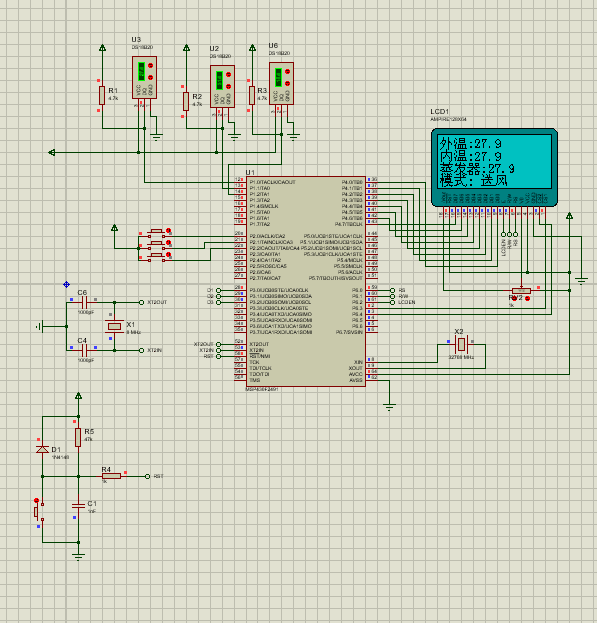
 我尝试了并行三个温度传感器 但是温度一直显示不对,然后试了下只编程一个 也是27.9不知道为什么 然后我自己做的按钮,编程好像也有点问题,求会做的教我,追加悬赏80
我尝试了并行三个温度传感器 但是温度一直显示不对,然后试了下只编程一个 也是27.9不知道为什么 然后我自己做的按钮,编程好像也有点问题,求会做的教我,追加悬赏80
/*******************************************
函数名称:DS18B20_Reset
功 能:对DS18B20进行复位初始化操作
参 数:无
返回值 :初始化状态标志:0--失败,1--成功
********************************************/
uchar DS18B20_Reset(void)
{
uchar Error=0;
P1DIR = 0xff;
_DINT();
P1OUT = 0x00;
DelayNus(500);
P1OUT = 0xff;
DelayNus(55);
P1DIR = 0x00;
_NOP();
if(P1IN == 0x00)
{
Error = 1; //初始化成功
}
else
{
Error = 0; //初始化失败
}
P1DIR = 0xff; //设置为输出,并MCU给出高电平
P1OUT = 0xff;
_EINT();
DelayNus(400);
return Error;
}
//总线读取一个数据位
uchar DS18B20_ReadDQ(void)
{
uchar DQ_S=0;
P1OUT = 0x00; //8个DQ 线全部设置为低电平
DelayNus(6);
P1OUT = 0xff;
DelayNus(8);
P1DIR = 0x00; //准备读取
_NOP(); //延时待总线准备好数据
DQ_S = P1IN; //一次性读取8条DQ线的数据状态
DelayNus(45);
P1DIR = 0xff;
P1OUT = 0xff; //恢复端口电平
DelayNus(10); //延时
return DQ_S; //返回读取的值
}
//写数据
void DS18B20_WriteByte(uchar Com)
{
uchar i;
_DINT();
for(i=0;i
{
P1DIR = 0xff;
P1OUT = 0x00;
DelayNus(6);
if (Com&0x01)
{
P1OUT = 0xff;
}
else
{
P1OUT = 0x00;
}
Com = Com>>1;
DelayNus(50);
P1OUT = 0xff;
DelayNus(10);
}
_EINT();
}
// 录入两位数据
void DS18B20_Read2Byte(void)
{
uint i;
for(i=0;i<16;i++)
{
Read_buf_8ch[i]=DS18B20_ReadDQ();
}
}
//启动温度转换
void DS18B20_Conver(void)
{
DS18B20_WriteByte(0xcc);
DS18B20_WriteByte(0x44);
}
//读取温度值
void DS18B20_ReadTemp(void)
{
uchar i;
char j,k;
uchar Mask;
do
{
i = DS18B20_Reset();
}
while(i);
DS18B20_Conver();
DelayNus(60000);
do
{
i = DS18B20_Reset();
}
while(i);
DS18B20_WriteByte(0xcc);
DS18B20_WriteByte(0xbe);
DS18B20_Read2Byte();
for(j=16;j>0;j--)
{
Mask=0x01;
for(k=0;k<3;k++)
{
uiData[k] = uiData[k]<<1;
if(Read_buf_8ch[j-1]&Mask) uiData[k]++;
Mask = Mask<<1;
}
}
}
//将十一位二进制数转换成六位整形数据
void Disp_Numb(uint temper)
{
uchar i;
for(i = 0;i < 6;i++) dN[i] = 0;
if(temper & BIT0)
{
dN[0] = 5;
dN[1] = 2;
dN[2] = 6;
}
if(temper&BIT1)
{
dN[1] += 5;
dN[2] += 2;
dN[3] += 1;
}
if(temper & BIT2)
{
dN[2] += 5;
dN[3] += 2;
if(dN[2] >= 10)
{
dN[2] -= 10;
dN[3] += 1;
}
}
if(temper&BIT3)
{
dN[3] += 5;
}
if(temper & BIT4)
{
dN[4] += 1;
}
if(temper & BIT5)
{
dN[4] += 2;
}
if(temper & BIT6)
{
dN[4] += 4;
}
if(temper & BIT7)
{
dN[4] += 8;
if(dN[4] >= 10)
{
dN[4] -= 10;
dN[5] += 1;
}
}
if(temper & BIT8)
{
dN[4] += 6;
dN[5] += 1;
if(dN[4] >= 10)
{
dN[4] -= 10;
dN[5] += 1;
}
}
if(temper & BIT9)
{
dN[4] += 2;
dN[5] += 3;
if(dN[4] >= 10)
{
dN[4] -= 10;
dN[5] += 1;
}
}
if(temper & BITA)
{
dN[4] += 4;
dN[5] += 6;
if(dN[4] >= 10)
{
dN[4] -= 10;
dN[5] += 1;
}
if(dN[5] >= 10)
{
dN[5] -= 10;
}
}
}
//显示当前温度
void Disp_TEM(void)
{
char Bai,Shi,Ge; //定义变量
Disp_Numb(Cur_TMP1);
Bai=dN[5];
Shi=dN[4];
Ge =dN[3];
Disp_EN(1,6,table1[Bai]);
Disp_EN(1,7,table1[Shi]);
Disp_EN(1,8,table1[11]);
Disp_EN(1,9,table1[Ge]);
DelayNus(100);
Disp_Numb(Cur_TMP2);
Bai=dN[5];
Shi=dN[4];
Ge =dN[3];
Disp_EN(2,6,table1[Bai]);
Disp_EN(2,7,table1[Shi]);
Disp_EN(2,8,table1[11]);
Disp_EN(2,9,table1[Ge]);
DelayNus(100);
Disp_Numb(Cur_TMP3);
Bai=dN[5];
Shi=dN[4];
Ge =dN[3];
Disp_EN(3,8,table1[Bai]);
Disp_EN(3,9,table1[Shi]);
Disp_EN(3,10,table1[11]);
Disp_EN(3,11,table1[Ge]);
DelayNus(100);
}
//按键检测
uchar Keyscan()
{
uchar temp,key;
P2DIR=0x00;
temp=P2IN;
if (temp==0x01)
{
DelayNus(10);
if (temp==0x01) key=1;
}
if (temp==0x02)
{
DelayNus(10);
if (temp==0x02) key=2;
}
if (temp==0x04)
{
DelayNus(10);
if (temp==0x03) key=3;
}
else
{
DelayNus(10);
}
return key;
}
//主程序
int main(void)
{
WDTCTL=WDTPW+WDTHOLD;
BCSCTL1 &= ~XT2OFF;
_EINT();//打开全局中断
TACTL |= TASSEL_2 + ID_3;
Ini_Lcd();
while(1)
{
GDWZ();
DS18B20_ReadTemp();
Cur_TMP1=uiData[0];
Cur_TMP2=uiData[1];
Cur_TMP3=uiData[2];
Disp_TEM();
key_number=Keyscan();
if (key_number==1)
{
if(Cur_TMP1<=10)
{
P3DIR = 0x05;
P3OUT = BIT0+BIT2;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[10]);
}
if(Cur_TMP1>10&&Cur_TMP1<20)
{
P3DIR = 0x01;
P3OUT = BIT0;
Disp_HZ(4,4,table2[11]);
Disp_HZ(4,5,table2[12]);
}
else
{
P3DIR = 0x03;
P3OUT = BIT0+BIT1;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[9]);
}
}
if(key_number==2)
{
if(Cur_TMP1<=20)
{
P3DIR = 0x05;
P3OUT = BIT0+BIT2;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[10]);
}
if(Cur_TMP1>20&&Cur_TMP1<30)
{
P3DIR = 0x01;
P3OUT = BIT0;
Disp_HZ(4,4,table2[11]);
Disp_HZ(4,5,table2[12]);
}
else
{
P3DIR = 0x03;
P3OUT = BIT0+BIT1;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[9]);
}
}
if (key_number==3)
{
if(Cur_TMP1<=30)
{
P3DIR = 0x05;
P3OUT = BIT0+BIT2;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[10]);
}
if(Cur_TMP1>30&&Cur_TMP1<40)
{
P3DIR = 0x01;
P3OUT = BIT0;
Disp_HZ(4,4,table2[11]);
Disp_HZ(4,5,table2[12]);
}
else
{
P3DIR = 0x03;
P3OUT = BIT0+BIT1;
Disp_HZ(4,4,table2[8]);
Disp_HZ(4,5,table2[9]);
}
}
else
{
P3DIR = 0x01;
P3OUT = BIT0;
Disp_HZ(4,4,table2[11]);
Disp_HZ(4,5,table2[12]);
}
Delay_Nms(1000);
Clear_LCD();
}
}



