初学stm32,实现功能:串口2连接扫描枪,获取一维码信息后通过串口1打印;目前已实现串口2通过串口调试助手发送数据,串口1能够在串口调试助手上打印接收到的数据,stm32通过pc串口调试助手模拟发送接收数据正常,扫描枪与pc串口助手发送接收数据正常,存在问题:stm32与扫描枪无法通信,串口2连接扫描枪后发送数据,串口1无法打印,debug发现串口2中断无数据接收。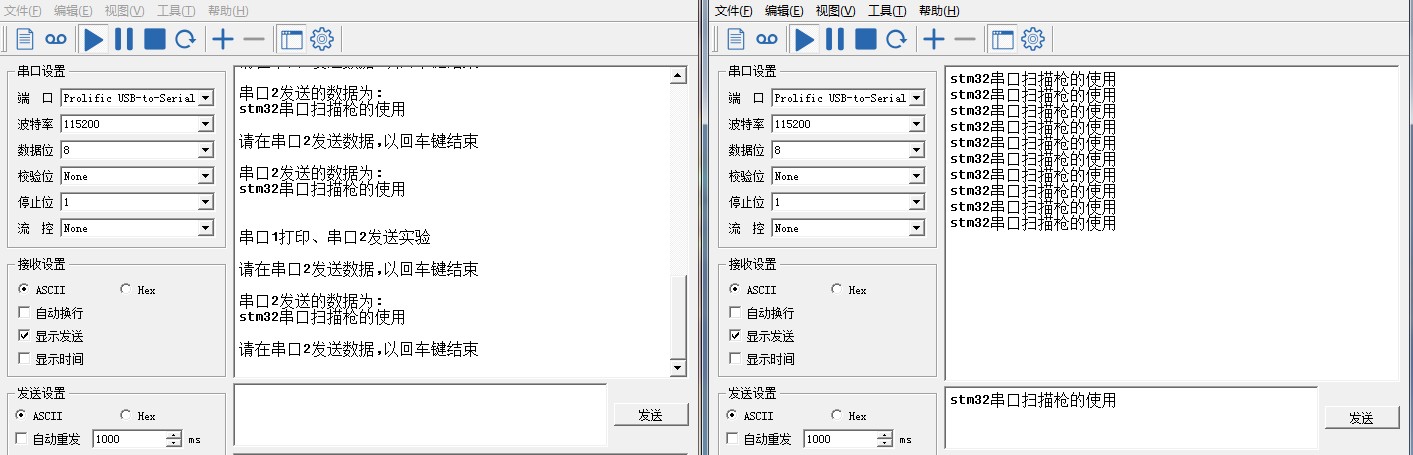

stm32获取串口扫描枪数据

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

 关注
关注是你写的程序通信嘛?如果我没有记错的话,串口通信是有协议的,发送的消息也需要转化成16进制,然后还有校验位等。错了一个就无法通信了。
解决 无用评论 打赏举报 分享
- 2023-03-12 14:24回答 2 已采纳 参考GPT的回答和自己的思路,你提供的代码片段有几个问题: 1.if 语句的条件有语法错误。USART_IT_RXNE 应该在 USART_GetITStatus 函数调用的括号外面。应该是这样的:i
- 2022-04-05 20:21回答 2 已采纳 不要在中断里面写print 写到应用里面,我刚刚用你的试了下没啥问题.在使用完你的USART3_RX_BUF之后记得把send_len(这个注意一下)和send_flag归零.还要确保你发送的数据是
- 2022-02-09 15:36回答 1 已采纳 1.首先确定你的板子收到了串口数据,从串口工具来看,是收到了。2.每次发送了测距指令之后,就开始判断是否接收到“01 10 00 28 00 01 81 C1,一个字节一个字节比对。全部正确后,再开始
- 2023-10-08 21:59机器视觉_小菜鸡的博客 所以 Cortex-A 一开始肯定是汇 编代码,其实 STM32 也一样的,一开始也是汇编,以 STM32F103 为例,启动文件 startup_stm32f10x_hd.s 就是汇编文件。 对于 Cortex-A 芯片来讲,大部分芯片在上电以后 C 语言环境还没...
- 2022-03-23 18:54回答 1 已采纳 你好,题主 首先,把main里加上void,符合C99规范; 接着,在while(1)前试着用一下打印printf看看有没有信息; 接着,在while(
- 2023-02-11 16:56回答 3 已采纳 该回答引用ChatGPT使用串口助手发送设定的距离范围到单片机进行运行,可以采用以下步骤: 1、在单片机代码中增加一个部分,用于接收来自串口助手的数据,并将其存储为变量。 2、在接收到的数据中,第一个
- 2022-05-12 18:53回答 2 已采纳 你的指令光发送不处理吗?有可能是缓冲区满了。
- 2022-08-17 17:22MCU_wb的博客 打开STM32CubeMX软件,创建新的工程文件,先生成一个带有freertos操作系统的串口1例程,生成串口的例程这里不再详细介绍。 (2).配置USB_OTG_HS,由于电路板上USB管脚连接的是PB14和PB15,所以这里配置USB_OTG_HS,...
- 2021-06-18 17:07回答 3 已采纳 HAL_HCD_IRQHandler(HCD_HandleTypeDef *hhcd)
- 2021-06-15 23:32回答 2 已采纳 你串口发送数据的时候按照0x02,第一个adc的低字节,第一个adc的高字节,第二个adc的低字节,第二个adc的高字节,第三个adc的低字节,第三个adc的高字节,第四个adc的低字节,第四个adc
- 2022-08-07 22:09回答 2 已采纳 1.那个是你的buff的地址,你可以对你的缓存器取地址之后仿真一下就知道了2.串口读完之后直接就在你的缓存器数组里,单独拿字符就跟数组用法一样
- 2023-04-03 10:32hqb_newfarmer的博客 stm32蓝牙模块和超声波测距模块
- 2022-04-29 15:54回答 3 已采纳 更新下驱动吧
- 2021-08-08 21:20她与樱花皆落503的博客 这里使用的是SMT32F103RCT6核心板 ...STM32搭配二模块扫描模块实现门禁 二维码启动C文件 #include <string.h> #include "QR_Scaner.h" #include "usart.h" #include "systick.h" uint8_t ...
- 2022-07-05 09:15DS小龙哥的博客 (2) 上位机运行效果 上位机需要连接STM32设备之后才可以获取温度数据,点击软件上的打开摄像头按钮,开启摄像头,让检测到人脸时,下面会显示当前测量的温度。如果没有连接STM32设备,那么默认会显示一个正常的固定...
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 执行 virtuoso 命令后,界面没有,cadence 启动不起来
- ¥50 comfyui下连接animatediff节点生成视频质量非常差的原因
- ¥20 有关区间dp的问题求解
- ¥15 多电路系统共用电源的串扰问题
- ¥15 slam rangenet++配置
- ¥15 有没有研究水声通信方面的帮我改俩matlab代码
- ¥15 ubuntu子系统密码忘记
- ¥15 保护模式-系统加载-段寄存器
- ¥15 电脑桌面设定一个区域禁止鼠标操作
- ¥15 求NPF226060磁芯的详细资料