
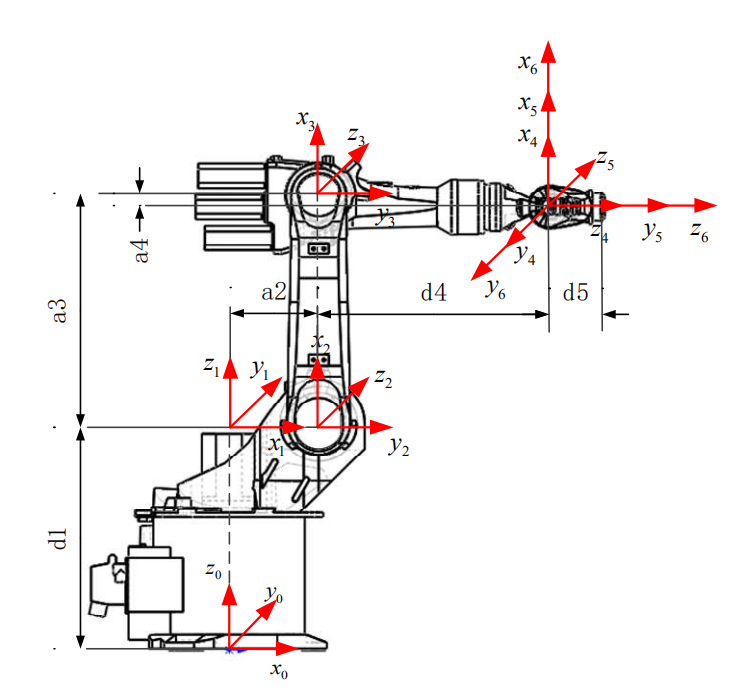
如图所示,kuka机器人坐标系的基坐标系一般在底座,然后根据右手定则以及D-H坐标系规则建立如图坐标系。现在的问题有两个:
一、如图所示按照D-H坐标系的规则以及右手定则建立的坐标系是否正确?
二、
%建立机器人模型
% theta d a alpha offset
L1=Link([0 675 0 0 0 ]);
L2=Link([0 0 260 0 0 ]);
L3=Link([0 0 680 0 0 ]);
L4=Link([0 0 -35 -pi/2 0 ]);
L5=Link([0 0 0 pi/2 0 ]);
L6=Link([0 0 0 -pi/2 0 ]);
上面是我根据图示D-H坐标系所获得的D-H参数,请问有没有问题?





