
搭建好三阶系统的线性自抗扰模型了
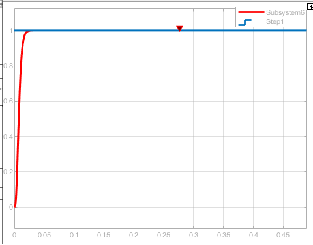
阶跃响应如下图,
放大后看有很小的稳态误差,如下图
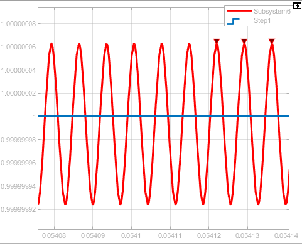
因为稳态误差,引起了观测值得超调和对扰动估计不准。
要怎么解决这个问题呢?
还有,自抗扰控制的对象都是开环传递函数吗?
分析原因是:
由于传递函数是这样的:
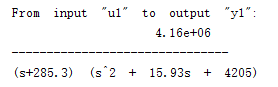
有一对共轭复跟和一个距离较远的极点。
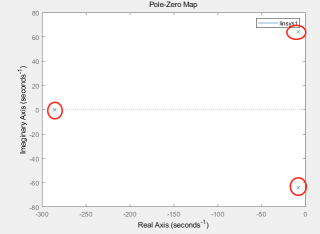
系统不稳定,导致自抗扰阶跃响应有稳态误差(通过仿真,实际上该系统PID控制也有稳态误差)
这是我自己分析的原因,因为用其他简单的三阶传递函数就没有超调问题。不知道分析的对不对,情各位批评指正。
然后,要怎么解决这个问题呢?







