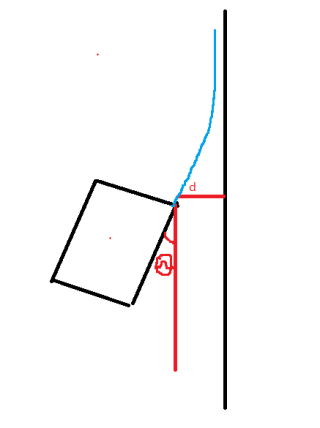
如图所示,可以根据传感器数据建模,从而实时地计算出小车靠墙一侧的前拐角距离墙边的距离d和小车车身与墙体的倾角θ。
求如何用PID算法调整小车的双轮速度, 使小车逼近墙边,在d达到期望距离时调整车头使小车与墙边平行并做直线运动。

如图所示,可以根据传感器数据建模,从而实时地计算出小车靠墙一侧的前拐角距离墙边的距离d和小车车身与墙体的倾角θ。
求如何用PID算法调整小车的双轮速度, 使小车逼近墙边,在d达到期望距离时调整车头使小车与墙边平行并做直线运动。
 分享
分享
%%%%两轮差速履带车数学模型建立%%%%%%
%%参数设置
L=4;%两个轮子间的距离
T=0.1;%采样时间
x=2;%初始化位置x坐标
y=1;%初始化位置y坐标
theta=pi/2;%初始化位置theta坐标
x_goal=10;%终点位置坐标
y_goal=10;%终点位置坐标
while((x-x_goal)^2+(y-y_goal)^2 >0.01&&(x-x_goal<=0))
%%%%%%%%%这一段设置跟踪器,跟踪一段直线%%%%%%
%%%计算当前与目标的朝向误差
theta_goal=atan((y_goal-y)/(x_goal-x));
theta_error=theta-theta_goal;
u=-k*(theta_error);
%%%%控制输入,左电机和右侧电机。
vr=4+u;%控制输入需要你去更改//4代表着你想让车走多快,我这里未考虑到。
vl=4;%控制输入需要你去更改
%%%%process model
%%%运动模型
v=(vl+vr)/2;%中心速度
w=(vr-vl)/L;
x=x+v*cos(theta)*T;
y=y+v*sin(theta)*T;
theta=theta+w*T;
x_push=[x_push;x];
y_push=[y_push;y];
theta_push=[theta_push;theta];
end
 系统已结题
5月2日
系统已结题
5月2日 创建了问题
4月24日
创建了问题
4月24日


