kuka simpro软件里机器人
组件属性 rcs 选项 usercs 选中和不选中对仿真有什么影响

kuka simpro软件里机器人
 分享
分享
该回答引用GPTᴼᴾᴱᴺᴬᴵ
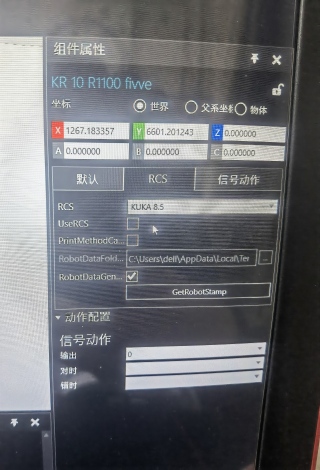
在KUKA SimPro软件中,机器人的组件属性rcs和usercs选项用于定义组件的坐标系。这两个选项的具体作用如下:
rcs:表示组件使用全局坐标系(robot coordinate system)还是使用局部坐标系(component coordinate system)。如果选中了rcs选项,则组件会使用全局坐标系,否则组件使用局部坐标系。一般情况下,使用全局坐标系可以使得组件的位置和方向更加准确。
usercs:表示组件是否使用用户自定义的坐标系。如果选中了usercs选项,则组件会使用用户自定义的坐标系,否则组件使用默认的坐标系。使用用户自定义的坐标系可以更加灵活地定义组件的位置和方向。
在实际应用中,选择rcs和usercs选项取决于具体的需求。一般情况下,选中rcs选项和不选中usercs选项可以获得较好的仿真效果,但如果需要更加灵活地定义组件的位置和方向,则需要选中usercs选项并自定义坐标系。
分享 系统已结题
3月26日
系统已结题
3月26日 已采纳回答
3月18日
创建了问题
3月18日
已采纳回答
3月18日
创建了问题
3月18日


