关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
三蛋000
2023-03-24 11:30
采纳率: 66.7%
浏览 60
首页
编程语言
已结题
编译darknet_ros报错
c++
目标检测
ubuntu
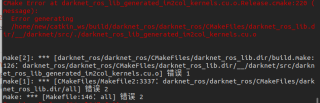
编译darknet_ros是出现下面的报错:
题主的系统是ubuntu20.04,cuda11.1。ros接触较少,望解答万分感谢!
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
CSDN-Ada助手
CSDN-AI 官方账号
2023-03-24 14:23
关注
你看下这篇博客吧, 应该有用👉 :
darknet_ros部署及测试
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
基于jetson nano的
dar
knet
_
ros
包
2021-07-04 11:44
这个文件夹可能包含了
dar
knet
_
ros
包的所有源代码、配置文件、依赖项以及
编译
后的可执行文件,使得用户可以直接在Jetson Nano上运行YOLOv3对象检测。 总的来说,这个项目展示了如何在资源受限的嵌入式平台上利用
ROS
...
dar
knet
_
ros
:YOLO
ROS
:
ROS
的实时对象检测
2021-02-05 09:53
dar
knet
_
ros
一般作为
ROS
工作空间的一个源码包,通过git clone获取代码,然后在
ROS
环境中
编译
安装。 2. 配置模型:选择合适的预训练YOLO模型,如YOLOv3或YOLOv4,并将其权重文件放入指定目录。此外,可能还需要根据...
dar
knet
_
ros
运行
报错
2024-08-27 17:13
weixin_47382577的博客
这种问题,我认为是gpu或者是cuda的问题。这个库的需求gpu较低,而目前使用的过高。将配置修改为符合自己电脑的配置。我是进行注释上面两行代码就可以了。当按照官网的方式,下载...找到
dar
knet
_
ros
下的cmakelist.txt。
dar
knet
_
ros
_git.tar.xz
2020-04-13 22:37
本功能包是
dar
knet
_
ros
功能包,基于COCO数据集的80类目标实时检测源代码,按照我博客的步骤简单
编译
即可运行。实现摄像头输入的实时检测目标并通过
ros
话题发布目标类型和置信度等消息。由于我
编译
好的功能包体积太大...
dar
knet
_
ros
.zip
2020-07-05 20:40
《
ROS
下实现YOLO物体检测:
dar
knet
_
ros
.zip详解》 在现代机器人系统中,计算机视觉技术扮演着至关重要的角色,而YOLO(You Only Look Once)作为一种高效的实时目标检测算法,广泛应用于无人驾驶、无人机、安防等...
解决
dar
knet
_
ros
_msgs
编译
失败
2024-11-12 18:03
Ticking.的博客
dar
knet
_
ros
_msgs
编译
失败 / 缺少
dar
knet
_
ros
_msgsConfig.cmake等文件
dar
knet
_
ros
-release
2021-04-14 04:45
dar
knet
_
ros
(noetic)-1.1.5-1 通过在Thu, 08 Apr 2021 19:28:28 -0000运行/usr/bin/bloom-release --
ros
distro noetic --track noetic
dar
knet
_
ros
,将
dar
knet
_
ros
存储库中的软件包发布到了noetic发行版中。...
编译
dar
knet
_
ros
时
报错
:OpenCV 4.x+ requires enabled C++11 support
2024-09-12 01:29
重启_2020的博客
编译
dar
knet
_
ros
时
报错
:OpenCV 4.x+ requires enabled C++11 support
dar
knet
_
ros
编译
报错
以及在RVIZ中显示乱码
2021-03-17 13:33
融合算法工程师—常飞翔的博客
最近在arm平台上部署
dar
knet
...首先下载
dar
knet
_
ros
,资源在网上有很多,但是下载后不是完整的,需要替换里面的
dar
knet
包,之后在进行
编译
时,出现 解决办法有两种 1、不使用catkin_make
编译
,使用命令进行
编译
ca
jetson agx xavier +
dar
knet
ros
——
编译
出错
2021-01-07 17:28
Could not find a package configuration file provided by “
dar
knet
_
ros
_msgs” with any of the following names:
dar
knet
_
ros
_msgsConfig.cmake
dar
knet
_
ros
_msgs-config.cmake Add the installation ...
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告
问题事件
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
系统已结题
4月8日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
已采纳回答
3月31日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
创建了问题
3月24日


 分享
分享 系统已结题
4月8日
系统已结题
4月8日 已采纳回答
3月31日
已采纳回答
3月31日




