
有一个双目摄像头,怎么通过双目摄像头来获取到摄像头画面中的人的三维坐标?


1条回答 默认 最新

 关注
关注- 建议你看下这篇博客👉 :视频压缩与三维姿态跟踪,基于偏微分方程的图像编码和静电半调
- 除此之外, 这篇博客: 基于多视角融合的夜间无人车三维目标检测中的 1 多视角通道融合网络 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
本文所采用的多视角通道融合网络由特征提取模块、候选区域生成模块和通道融合模块组成,整体结构图如图1所示。
特征提取模块由特征编码网络和特征解码网络2 部分组成,结构如图2所示。
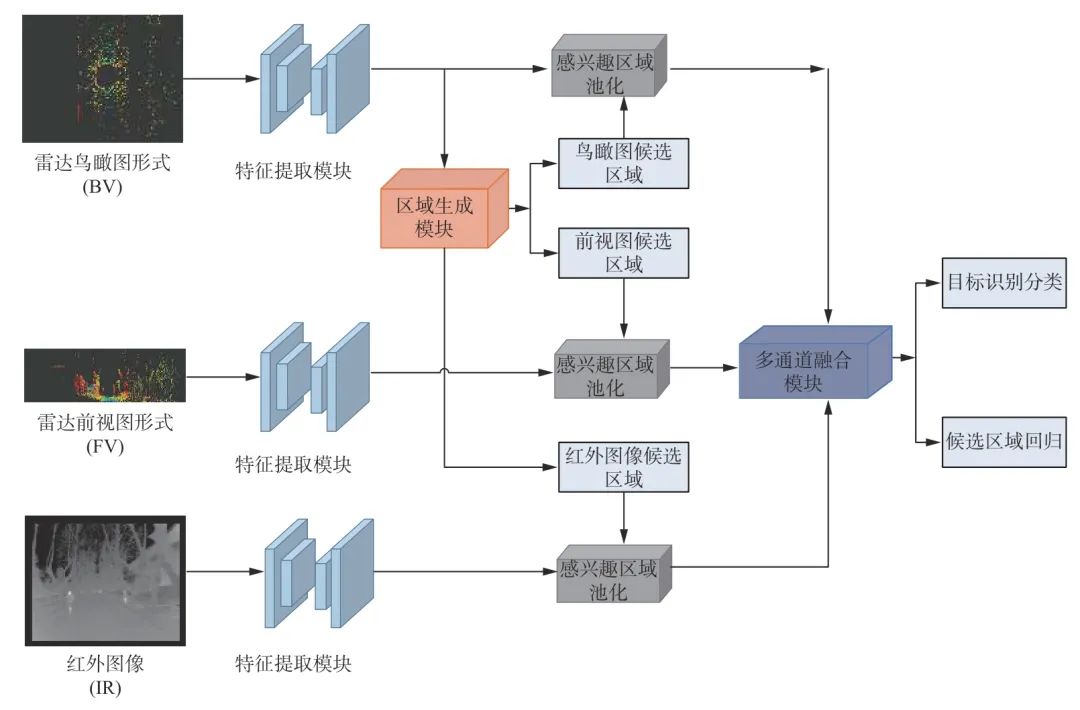
图1 多视角通道融合网络结构图
Fig.1 Structure diagram of multi-view channel fusion network
图2 特征提取模块结构图
Fig.2 Structure diagram of feature extraction module特征编码网络采用的是改进后的VGG(visual geometry group)16 网络[12],将原VGG16 网络的通道数减少一半至50%,然后在网络中加入批标准化层,并在Conv4 删除最大池化层。特征编码网络将M×N×C的红外图像、鸟瞰图或前视图作为输入,并输出
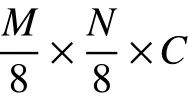
的特征图。式中,M表示图像的长,N表示图像的宽,C表示通道数。对于红外图像,C为1。特征解码网络采用特征金字塔网络[13]的形式,学习将特征映射上采样回原始的输入大小。特征解码网络将特征编码网络的输出作为输入,输出新的 M×N×D的特征图,如图2所示,通过转换-转置操作对输入进行上采样处理,并和来自特征编码网络的对应特征映射进行级联操作,最后通过3×3 卷积来融合二者。
输入一幅鸟瞰图,候选区域生成模块会生成一系列的三维候选区域。每个三维候选区域有六维的参数:(x,y,z,l,w,h),分别表示三维候选区域在激光雷达坐标系中的中心坐标和长宽高尺寸。对于每个三维候选区域,对应在鸟瞰图中的参数(xbv,ybv,lbv,wbv)利 用离散的 (x,y,l,w)变换可以得到,表示三维候选区域在鸟瞰图中的坐标和长宽,其中 离散分辨率为0.1 m。
通道融合模块结合各个视角的特征,对各视角上的目标进行联合分类,并针对三维候选区域进行定向回归。由于不同的视角有不同的分辨率,对于每个视角通道所输出的不同分辨率的特征向量,通过ROI(region of interest)池化操作将每个视角通道所输出的特征向量调整到相同的长度。通过下式得到3 个视角不同的ROI。

式中:T3D→v表示从激光雷达点云坐标系到鸟瞰图形式、前视图形式,和红外图像的转换函数;P3D表示三维候选区域参数向量。对于区域候选网络所生成的三维候选区域,将其投影到经过ROI池化操作的鸟瞰图形式(BV)特征向量、前视图(FV)特征向量和红外图像(IR)特征向量中。对于从某个视角特征提取通道中输出的特征向量 x,通过ROI池化获得固定长度的特征 fv。

式中:R表示相应的矩阵变换。为了融合来自各个视角通道的特征信息,采用多层次融合的方法,分层融合多视角特征,使得各通道的信息可以在中间层有更多的交互。如图3所示。

图3 通道融合网络结构图
Fig.3 Structure diagram of channel fusion network对于通道融合网络的每一层,输入为鸟瞰图形式、前视图形式以及红外图像3 个通道的特征,经过一次逐元素平均计算后,再经过各自的中间卷积层进一步提取特征。具体的融合过程如下式所示。
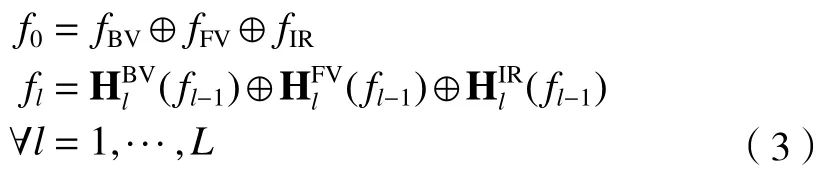
式中:fl表示第 l层的融合结果;fBV、fFV和 fIR分别表示鸟瞰图通道、前视图通道以及红外图像通道的输入特征;

表示第l层不同通道的中间卷积层;⊕表示逐元素平均运算;经过通道融合网络融合各个视角通道的特征之后,利用融合结果对候选区域模块生成的三维候选区域进行回归校正,并将融合结果输入Softmax 分类器对三维候选区域内的物体进行分类识别。
- 您还可以看一下 王西猛老师的商超收银软件排队挂单取单编程思路教程课程中的 点餐软件开发过程中的挂单取单编程概述小节, 巩固相关知识点
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
分享
- 2023-02-14 10:25金刚廉神兽的博客 要通过双目相机获取人的三维坐标,需要使用三维重建技术。通过左右两个摄像头捕捉到的图像,利用立体视觉原理计算出每个像素的深度信息,并进一步根据摄像头的内外参数把这些深度信息转换成三维空间中的点坐标。最后...
- 2018-01-09 21:15Naruto_Q的博客 先说一下单/双目的测距原理区别:单目测距原理:先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车还是行人...
- 2023-09-09 00:30格图素书的博客 的空间映射到更高维度的空间,这会增加数据的通道,但并非所有的通道都包含有用的信息,但是由于点云数据的特性,点云处理一直是一个具有。有些通道包含大量冗余信息,这对提取更具代表性的信息是无用的,甚至是有害...
- 2024-11-05 15:01格图素书的博客 随着信息技术的发展,依据生物个体特征的身份检测及鉴别技术受到越来 越多的关注和研究,相关研究成果也正向地推动了国家社会的发展。目前已提 出多种生物特征识别技术,但都存在一些不可避免的缺陷。目前常用的有:...
- 2019-05-28 16:16ninedayai的博客 相机标定:摄像头由于光学透镜的特性使得成像存在着径向畸变,可由三个参数k1,k2,k3确定;由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数p1,p2确定。单个摄像头的定标...
- 2023-06-20 08:26林聪木的博客 我国的机器人市场需求世界领先,在医疗、...从2020年新冠疫情出现开始,由于各类公共场都需要减少面对面的人工服务,各种服务机器人的需求量逐渐增加,还产生了很多新型种类的服务机器人,自动接待、智能无人配送等新。
- 2020-08-28 17:13smartvxworks的博客 双目测距公式解析 看双目测距的时候一个公式就给难住了,网上各种解析很多更是弄得云山雾绕,写下自己的一点理解,自认为非常合理。 就是这个公式: 点P在成像平面上的两个点Pl、Pr的坐标分别是 所谓视差,...
- 2024-09-02 17:40嵌入式全栈苏工的博客 可视化方式分为一维、二维、三维、多维、时序、层次、网状的信息可视化方式。信息可视化映射技术 PFNET最早被使用,它通过对事物的理解、分析,形成自己特有的网络表现方式,进而实现不同事件之间分层归纳。
- 2024-12-11 11:54whaosoft-143的博客 图 7 是 Internal-α 和 Internal-Σ 的一个总结,作者通过各种指标来评估数据集的多样性,包括每个图像的名词多样性、总名词计数、平均标题长度和平均名词。 图6:字幕长度的直方图可视化。从原始字幕、内部 α 和...
- 2017-07-05 16:13tangxiaohu1234的博客 SLAM特指:特指搭载传感器的主体,在没有环境先验的信息情况下,在运动过程中建立环境模型,通过估计自己的运动。 SLAM的目的是解决两个问题:1、定位 2、地图构建 也就是说,要一边估计出传感器自身的位置,...
- 2025-02-17 15:45whaosoft-143的博客 社区反应 这篇工作放在arXiv上和开源不到三周,获得了github star 450+,Huggingface数据集tredning次页,也收到了推特上很多大V的转发(AK Huggingface paper daily)。 最近ComfyUI社区也有人注意到这项工作,...
- 2022-02-07 17:03MetaGrad的博客 基于多特征的轮船运动目标跟踪及轨迹获取方法 基于多特征融合和集成学习器的视频动作识别系统研究与实现 基于多目摄像头的运动目标跟踪研究 基于多示例学习的动作检测方法研究 基于多约束目标的智能水下机器人运动...
- 2025-10-29 02:40情绪过载的博客 此外,增强现实还支持开发动态游戏,让用户在真实环境中行走,通过智能手机不仅获得娱乐,还能获取有用信息,例如如何更好地关注自身健康。 最近推出的增强现实护目镜(例如,微软HoloLens和谷歌眼镜)实现了人类与...
- 2020-12-29 10:02和你在一起^_^的博客 AR是人工智能和人机交互的交叉学科,基础技术包括CV(计算机视觉)、机器学习、多模态融合等,借凌老师去年的一篇文章简单科普AR技术。 作者亮风台信息科技首席科学家凌海滨 一、从现实到增强...
- 2022-10-27 16:52luna*?????的博客 虚拟现实技术产生于20世纪60年度,是把客观...逐渐突破交互维度的限制,发展为直接在三维空间交互的三维人机交互方式,将现实中人与真实环境交互的经验运用到虚拟人机环境中,消除用户为适应计算机系统带来的认知负担。
- 2022-04-01 14:01爱是与世界平行的博客 探测周围环境的三维坐标来进行信息融合优势则相当明显——由于传感器安装的高度基本可让其拥有“上帝视野”,不容易被遮挡,视距条件更好,可最大化减少盲区,提高数据获取的准确性,数据实时发送到ITS中心(智能...
- 没有解决我的问题, 去提问

问题事件
 系统已结题
4月5日
系统已结题
4月5日 已采纳回答
3月28日
已采纳回答
3月28日-
创建了问题
3月27日