stm32持续输出pwm,然后没间隔一秒钟通过串口发送一次数据,需要用到几个计时器,两个中断的优先级是怎么设置的。

stm32持续输出pwm,间隔一秒向串口发送一次数据

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

 关注
关注- 帮你找了个相似的问题, 你可以看下: https://ask.csdn.net/questions/7503347
- 我还给你找了一篇非常好的博客,你可以看看是否有帮助,链接:【STM32步进电机】PWM调节脉冲输出个数,从而精准控制角度,完成伺服控制。
- 除此之外, 这篇博客: 使用stm32互补输出PWM波并且控制死区时间,带刹车功能中的 使用stm32互补输出PWM波并且控制死区时间,带刹车功能 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
项目背景:
需要20k带死区时间的互补pwm波连接IGBT驱动器。
使用高级定时器1,CH1——PA8,CH1N——PB13,BKIN——PB12,如果是复用引脚需要打开时钟,注意时钟配置。
主要使用的寄存器为TIM1_BDTR
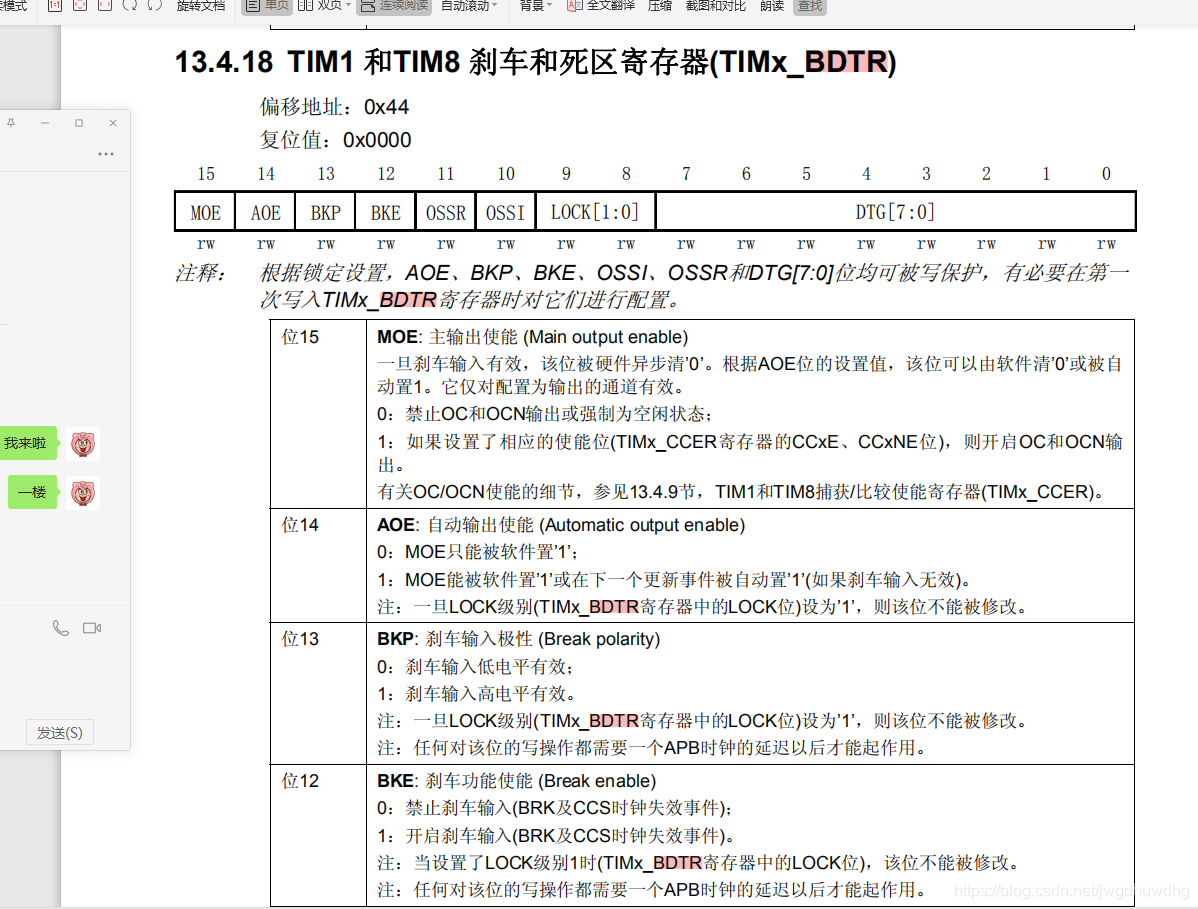
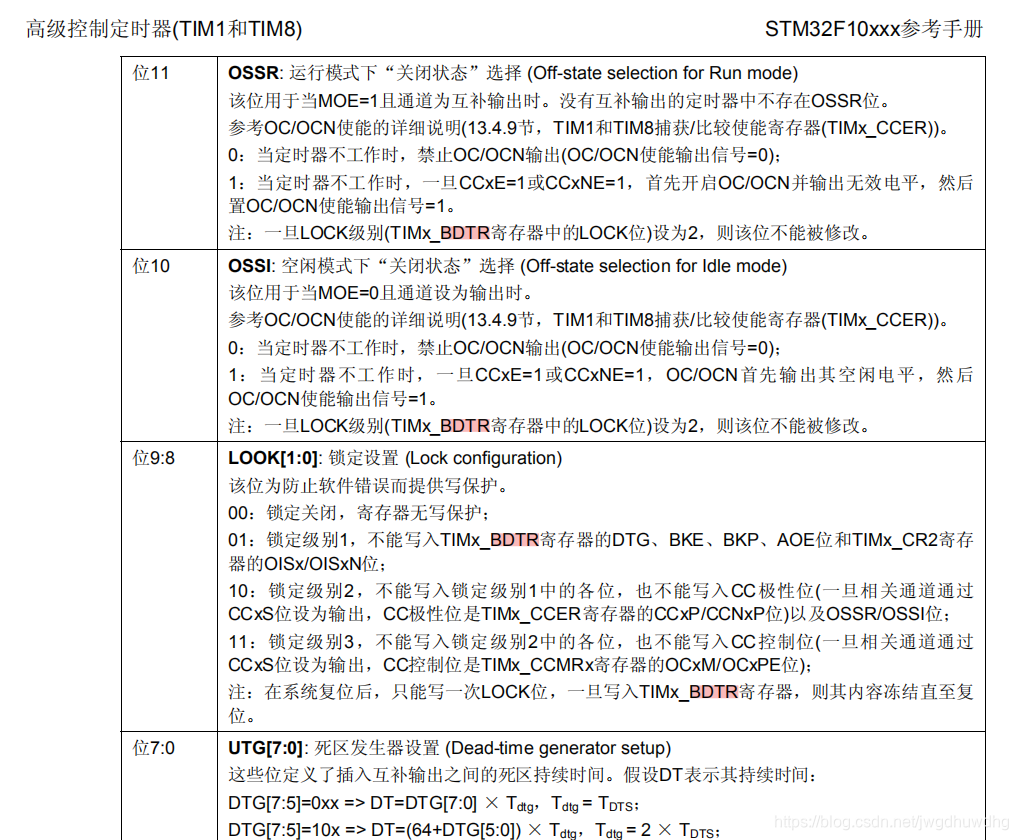

从手册可以看到有些数据位能否修改和LOCK级别有关系。
其中BKIN默认输出低电平,先将频率配置成20kTIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断 TIM_TimeBaseStructure.TIM_Period=359; // 驱动CNT计数器的时钟 = Fck_int/(psc+1) TIM_TimeBaseStructure.TIM_Prescaler= 9; // 时钟分频因子 ,配置死区时间时需要用到 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; // 计数器计数模式,设置为向上计数 TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 重复计数器的值,没用到不用管 TIM_TimeBaseStructure.TIM_RepetitionCounter=0; // 初始化定时器 TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);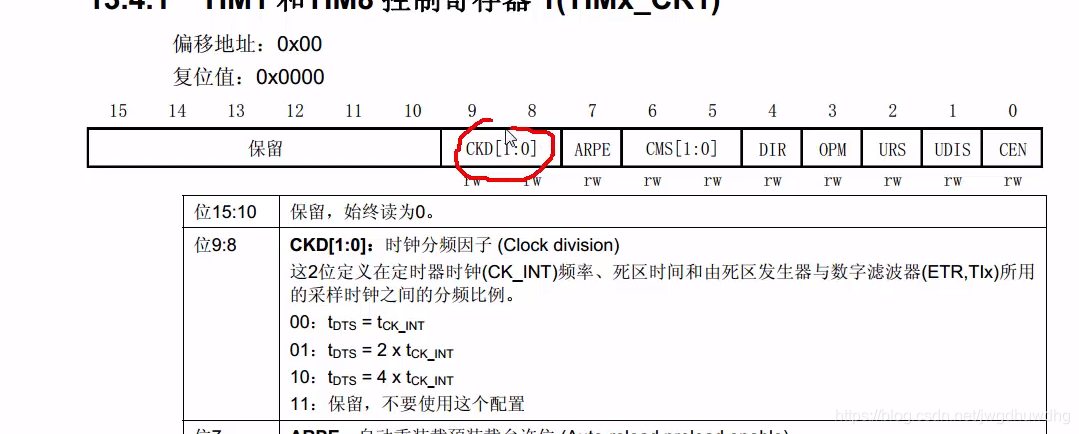
f=72m/(359+1)*(9+1)=20k
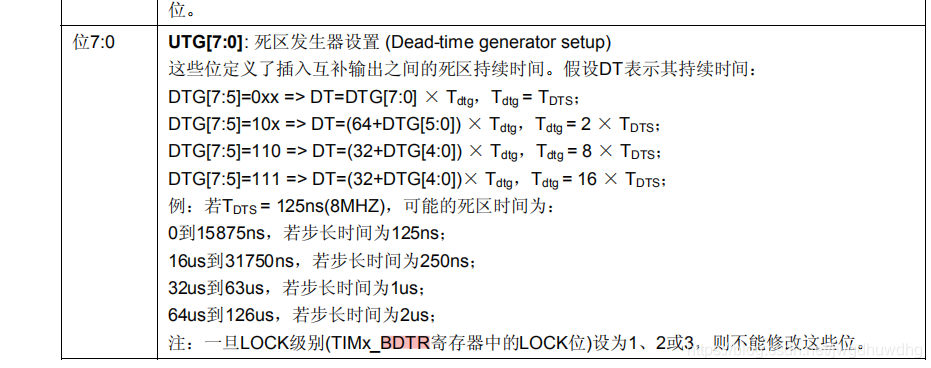
其中TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; 这个语句是指死区时间的分频因子,也可以使用ETR外部时钟,这里是用的内部时钟72m,分频为1.也就是DTS的时间为72m,如果是01就是36m,如果是10就是18m。TIM_OCInitTypeDef TIM_OCInitStructure; // 配置为PWM模式1 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 互补输出使能 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; // 设置占空比大小 TIM_OCInitStructure.TIM_Pulse =180; // 输出通道电平极性配置 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 互补输出通道电平极性配置 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; // 输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; // 互补输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; TIM_OC1Init(ADVANCE_TIM, &TIM_OCInitStructure); TIM_OC1PreloadConfig(ADVANCE_TIM, TIM_OCPreload_Enable);TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; // 输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; // 互补输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; 这两句还挺重要的,就是当使能这个刹车功能了,断路以后,这个通道是高电平还是低电平,也就是占空比为0还是100 之前做项目时就遇到这个问题,一会儿高电平一会低电平,因为控制的是电机,高电平时直接电机最大功率运作了,所以这里也需要注意一下,这个叫空闲电平,也有库函数可以直接调用配置。// 有关刹车和死区结构体的成员具体可参考BDTR寄存器的描述 TIM_BDTRInitTypeDef TIM_BDTRInitStructure; TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; // 输出比较信号死区时间配置,具体如何计算可参考 BDTR:UTG[7:0]的描述 // 这里配置的死区时间为152ns TIM_BDTRInitStructure.TIM_DeadTime = 11; TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable; // 当BKIN引脚检测到高电平的时候,输出比较信号被禁止,就好像是刹车一样 TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(ADVANCE_TIM, &TIM_BDTRInitStructure); // 使能计数器 TIM_Cmd(ADVANCE_TIM, ENABLE); // 主输出使能,当使用的是通用定时器时,这句不需要 TIM_CtrlPWMOutputs(ADVANCE_TIM, ENABLE);这里的死区时间为11,也就是寄存器UTG[7:0],DTS=1/72M,[7:5]这三位是000也就是第一种计算方式,这里配置成11,也就是11/72000000=152ns。只需要修改TIM_DeadTime即可,手册也写的很清楚了,如果是72m,那么死区时间的范围是14ns至17523ns。如果8m,范围是125ns至15875ns。

注:关闭延迟时间的最大值减去开通时间最小值。
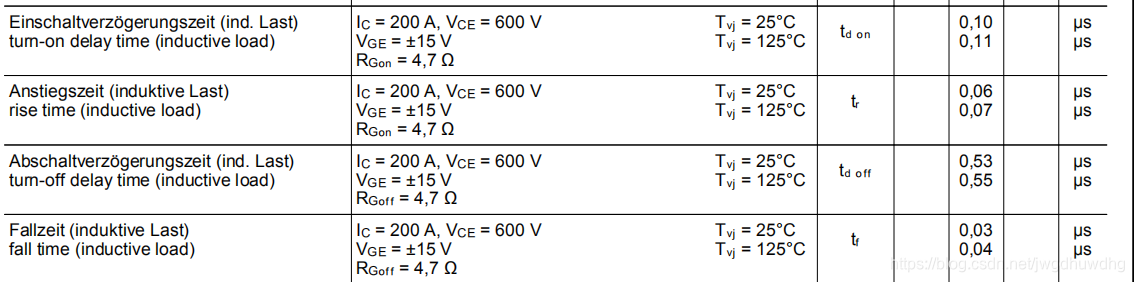
这里是IGBT的参数,所以我们只要设置死区时间为450ns,450/13.89=32.3,也就是33.
主函数初始化就好了。

- 以下回答由chatgpt基于相关博客总结生成:
根据参考资料和问题要求,可以使用STM32中的定时器和串口模块来设置连续输出PWM信号,并每秒向串口发送一次数据。其中需要使用哪些计时器?可以根据具体需求选择,常用的有TIM2,TIM3,TIM4,TIM5等。下面就以TIM3为例,给出具体步骤及代码实现:
1.设置定时器 首先要初始化计时器 TIM3,并设置其工作模式。在 TIM_TimeBaseStructure 结构体中配置定时器的 ARR 和 PSC (分别代表计时器的自动重装值和分频系数),并将计时器启动。
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); TIM_TimeBaseStructure.TIM_Period = 7999; // 设置 ARR 为 7999,即自动重装值为 7999 TIM_TimeBaseStructure.TIM_Prescaler = 8; // 设置分频系数为 8,即计数器在 1MHz 的时钟频率下递增 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_Cmd(TIM3, ENABLE); // 启动定时器 TIM32.设置计时器中断 开启TIM3定时器的中断并设置中断优先级。定时器的中断服务程序中,向串口发送一次数据。
NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //配置 TIM3 中断向量 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 设置中断抢占优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 设置中断响应优先级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 开启 TIM3 中断 NVIC_Init(&NVIC_InitStructure); TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除 TIM3 的更新中断标志位 TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); // 开启计时器 TIM3 的更新中断其中,中断服务函数 TIM3_IRQHandler 的代码如下:
void TIM3_IRQHandler(void) { if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) // 检查 TIM3 更新中断标志位是否置位 { int pulse1 = 2000; // 通道1的 PWM 脉冲宽度 int pulse2 = 4000; // 通道2的 PWM 脉冲宽度 int pulse3 = 6000; // 通道3的 PWM 脉冲宽度 TIM_SetCompare1(TIM3, pulse1); // 设置通道1的 PWM 脉冲宽度 TIM_SetCompare2(TIM3, pulse2); // 设置通道2的 PWM 脉冲宽度 TIM_SetCompare3(TIM3, pulse3); // 设置通道3的 PWM 脉冲宽度 USART_SendData(USART1, "Hello World\n"); // 向串口发送数据 TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除计时器 TIM3 的更新中断标志位 } }其中,TIM_SetCompare1/2/3 函数是用来设置计时器 TIM3 的三个通道的 PWM 脉冲占空比的函数,USART_SendData 函数是用来向串口发送数据的函数。
3.设置 PWM 输出 设置 TIM3 的三个通道为输出模式,并将对应的 GPIO 端口配置为复用输出模式即可。如下所示:
GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_0; // 设置 GPIOA 端口的第 0、6 和 7 个引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; // 将这三个引脚设置为复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_TIM3); // 配置引脚为 TIM3_CH1 复用 GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_TIM3); // 配置引脚为 TIM3_CH2 复用 GPIO_PinAFConfig(GPIOA, GPIO_PinSource0, GPIO_AF_TIM3); // 配置引脚为 TIM3_CH3 复用 TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 设置为 PWM1 模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出比较使能 TIM_OC1Init(TIM3, &TIM_OCInitStructure); // 初始化 TIM3_CH1 TIM_OC2Init(TIM3, &TIM_OCInitStructure); // 初始化 TIM3_CH2 TIM_OC3Init(TIM3, &TIM_OCInitStructure); // 初始化 TIM3_CH3 TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); // 使能 TIM3_CH1 的 CCR 寄存器预装载 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); // 使能 TIM3_CH2 的 CCR 寄存器预装载 TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); // 使能 TIM3_CH3 的 CCR 寄存器预装载 TIM_CtrlPWMOutputs(TIM3, ENABLE); // 主输出使能通过以上步骤,就可以实现在STM32中设置连续输出PWM信号并且每秒向串口发送一次数据。
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
- 2022-05-12 18:53回答 2 已采纳 你的指令光发送不处理吗?有可能是缓冲区满了。
- 2023-03-27 22:16回答 2 已采纳 这可能是由于您的nrf24l01模块配置有误导致的。请确保您正确配置了nrf24l01的寄存器和通信协议。此外,请检查以下几点: 检查nrf24l01的接线是否正确,包括VCC,GND,CE,CSN,
- 2022-10-12 21:46回答 3 已采纳 这篇文章讲的很详细,请看:stm32f103 TIM2定时器4路PWM输出实验
- 2022-06-01 21:13STM32 PWM 输出详解 STM32 是一款基于 ARM Cortex-M 内核的微控制器,广泛应用在嵌入式系统设计中。PWM(Pulse Width Modulation)即脉冲宽度调制,是电子控制系统中常见的信号生成技术,常用于电机控制、LED亮度...
- 2023-03-29 09:17回答 2 已采纳 按键按下,ARR和CCRx按比例增加/减少
- 2022-02-12 20:39回答 3 已采纳 unsigned char cap[6] = {'1','5','.','5','6',' '};前面的unsigned去掉。UART1_Send_Array函数改成下面的试试: void UART1
- 2022-02-16 20:02回答 10 已采纳 你的串口连线有问题!我以前也使用过正点原子STM32F103的开发板,你使用USB-TTL连接到ST-Link接口上面是通过串口读取不了数据的 一般使用ST-Link连接的,通过keil直接编译和烧
- 2022-02-25 18:24可以使用串口或其他通信方式将PWM输出的占空比或频率信息发送到PC进行监控。 6. **优化与调整**:根据实际应用的需求,可能需要对DMA传输速率、PWM频率、占空比等参数进行调整,以达到最佳效果。同时,注意检查代码...
- 2021-11-28 12:45回答 1 已采纳 PE5改成浮空输入,不要影响PB3波形状态就OK了
- 2021-09-06 15:05回答 2 已采纳 单片机pwm输出给自己的io吗,会不会是io配置问题,导致pwm全部被拉成低电平
- 2022-02-09 15:36回答 1 已采纳 1.首先确定你的板子收到了串口数据,从串口工具来看,是收到了。2.每次发送了测距指令之后,就开始判断是否接收到“01 10 00 28 00 01 81 C1,一个字节一个字节比对。全部正确后,再开始
- 2023-10-07 01:14Variables.的博客 答案是并不会,我们的目的是要用STM32去实现PWM,而STM32要实现PWM的核心在于。直接来看一个演示,如同下面的GIF图1.1所示,随着PWM Duty Cycle的改变,图片右边的LED灯的。1.时钟的来源(时钟源),包括内部高速RC...
- 2022-12-14 11:26回答 2 已采纳 如果移植没问题,测试串口可以正常,就排查下硬件连接有无问题,如果因为串口的问题不能进中断,检查下是否两边模块共地,串口通信的电平标准两边是否一致
- 2021-01-27 01:20在本文中,我们将深入探讨如何在STM32微控制器上实现PWM频率的检测,并将检测结果通过串口发送出去。STM32是一款广泛使用的、基于ARM Cortex-M内核的微控制器,具有丰富的外设接口和高性能特性,非常适合进行各种...
- 2019-06-20 19:59STM32L151C8T6是STM32系列中的一款超低功耗微控制器,广泛应用于各种嵌入式系统设计。 1. **STM32L151C8T6**: STM32L151C8T6是意法半导体(STMicroelectronics)制造的基于ARM Cortex-M3内核的微控制器。它具有高...
- 没有解决我的问题, 去提问



问题事件
 系统已结题
7月26日
系统已结题
7月26日 已采纳回答
7月18日
已采纳回答
7月18日-
创建了问题
4月25日
悬赏问题
- ¥15 Opencv(C++)异常
- ¥15 VScode上配置C语言环境
- ¥15 汇编语言没有主程序吗?
- ¥15 这个函数为什么会爆内存
- ¥15 无法装系统,grub成了顽固拦路虎
- ¥15 springboot aop 应用启动异常
- ¥15 matlab有关债券凸性久期的代码
- ¥15 lvgl v8.2定时器提前到来
- ¥15 qtcp 发送数据时偶尔会遇到发送数据失败?用的MSVC编译器(标签-qt|关键词-tcp)
- ¥15 cam_lidar_calibration报错