设计要求:该数字系统完成对十字路口交通信号灯的控制,十字路口由一条东西方向的主干道(简称A道)和南北方向的支干道(简称B道)构成。十字路口交通灯控制规则为:
(1) 初始状态为4个方向的红灯全亮,时间1s。
(2) 东西方向绿灯亮,南北方向红灯亮。东西方向通车,时间35s。
(3) 东西方向黄灯亮,南北方向红灯亮,时间5s。
(4) 东西方向红灯亮,南北方向绿灯亮。南北方向通车,时间50s。
(5) 东西方向红灯亮,南,北方向黄灯亮,时间5s。
(6) 返回(2),继续运行。
(7) 如果发生紧急事件,例如救护车,警车通过,则按下单脉冲按钮,使得东,南,西,北四个方向红灯亮。紧急事件结束后,松开单脉冲按钮,将恢复到被打断的状态继续运行。
任务:主要通过Verilog语言并仿真实现设计功能,用数码管显示剩余时间。
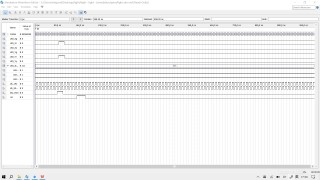
目前按键功能可以正常产生波形,但是红黄绿灯无法正常产生。
//状态机模块
module light(
input clk_50MHz,
input clk_1Hz,
input rst,
input key_SOS,//紧急按钮,按下后启动紧急模式
output reg LED_Xr,//南北方向红灯
output reg LED_Xy,//南北方向黄灯
output reg LED_Xg,//南北方向绿灯
output reg LED_Yr,//东西方向红灯
output reg LED_Yy,//东西方向黄灯
output reg LED_Yg,//东西方向绿灯
output reg [7:0] CntDis,//[7:4]为数码管高位,[3:0]为数码管低位
output wire [2:0] LED_state//状态指示灯
);
reg [2:0] state;
reg [5:0] cnt_96;//96进制计数器
assign LED_state=state;
initial state=0;
parameter S0=3'b000;//s0:全红1s
parameter S1=3'b001;//S1:南北方向红灯亮,东西方向绿灯亮35s
parameter S2=3'b010;//S2:南北方向红灯亮,东西方向黄灯亮5s
parameter S3=3'b011;//S3:南北方向绿灯亮,东西方向红灯亮50s
parameter S4=3'b100;//S4:南北方向黄灯亮,东西方向红灯亮5s
parameter s5=3'b101;//s5:返回s1
parameter S6=3'b111;//S4:全红(紧急模式)
always@(posedge clk_1Hz )//or negedge rst
begin
if(!rst)
cnt_96<=0;
//else
begin
if(cnt_96>=96)
cnt_96<=0;
//else
cnt_96<=cnt_96+1;
end
//数码管显示
begin
if(cnt_96>=90)
begin
CntDis[7:4]<=9;
CntDis[3:0]<=cnt_96-90;
end
begin
if(cnt_96>=80)
begin
CntDis[7:4]<=8;
CntDis[3:0]<=cnt_96-80;
end
begin
if(cnt_96>=70)
begin
CntDis[7:4]<=7;
CntDis[3:0]<=cnt_96-70;
end
begin
if(cnt_96>=60)
begin
CntDis[7:4]<=6;
CntDis[3:0]<=cnt_96-60;
end
begin
if(cnt_96>=50)
begin
CntDis[7:4]<=5;
CntDis[3:0]<=cnt_96-50;
end
begin
if(cnt_96>=40)
begin
CntDis[7:4]<=4;
CntDis[3:0]<=cnt_96-40;
end
begin
if(cnt_96>=30)
begin
CntDis[7:4]<=3;
CntDis[3:0]<=cnt_96-30;
end
begin
if(cnt_96>=20)
begin
CntDis[7:4]<=2;
CntDis[3:0]<=cnt_96-20;
end
begin
if(cnt_96>=10)
begin
CntDis[7:4]<=1;
CntDis[3:0]<=cnt_96-10;
end
begin
if(cnt_96>=0)
begin
CntDis[7:4]<=0;
CntDis[3:0]<=cnt_96;
end
end
end
end
end
end
end
end
end
end
end
begin
if(!rst)//
begin
LED_Xr<=0;
LED_Xy<=0;
LED_Xg<=0;
LED_Yr<=0;
LED_Yy<=0;
LED_Yg<=0;
end
//else
begin
if(key_SOS)
begin
LED_Xr<=1;
LED_Xy<=0;
LED_Xg<=0;
LED_Yr<=1;
LED_Yy<=0;
LED_Yg<=0;
cnt_96<=0;
CntDis[7:4]<=0;
CntDis[3:0]<=0;
state<=3'b111;
end
else
begin
case(state)
S0:
begin
if(cnt_96<=1)
begin
LED_Xr<=1;
LED_Xy<=0;
LED_Xg<=0;
LED_Yr<=1;
LED_Yy<=0;
LED_Yg<=0;
end
else
state<=S1;
end
S1:
begin
if(cnt_96<=36)
begin
LED_Xr<=1;
LED_Xy<=0;
LED_Xg<=0;
LED_Yr<=0;
LED_Yy<=0;
LED_Yg<=1;
end
else
state<=S2;
end
S2:
begin
if(cnt_96<=41)
begin
LED_Xr<=1;
LED_Xy<=0;
LED_Xg<=0;
LED_Yr<=0;
LED_Yy<=1;
LED_Yg<=0;
end
else
state<=S3;
end
S3:
begin
if(cnt_96<=91)
begin
LED_Xr<=0;
LED_Xy<=0;
LED_Xg<=1;
LED_Yr<=1;
LED_Yy<=0;
LED_Yg<=0;
end
else
state<=S4;
end
S4:
begin
if(cnt_96<=96)
begin
LED_Xr<=0;
LED_Xy<=1;
LED_Xg<=0;
LED_Yr<=1;
LED_Yy<=0;
LED_Yg<=0;
end
else
state<=S1;
end
endcase
end
end
end
end
endmodule
/*译码器模块*/
module v_decoder(
input clk_50MHz,
input rst,
input [3:0] IN_CODE,
output reg [6:0] OUT_CODE
);
always@(posedge clk_50MHz or negedge rst)
begin
if(!rst)
begin
OUT_CODE<=0;
end
else
begin
case(IN_CODE)
0:OUT_CODE<=7'b1111110;
1:OUT_CODE<=7'b0110000;
2:OUT_CODE<=7'b1101001;
3:OUT_CODE<=7'b1111001;
4:OUT_CODE<=7'b0110011;
5:OUT_CODE<=7'b1011011;
6:OUT_CODE<=7'b1011111;
7:OUT_CODE<=7'b1110000;
8:OUT_CODE<=7'b1111111;
9:OUT_CODE<=7'b1110011;
default:OUT_CODE<=7'b0000000;
endcase
end
end
endmodule
/*分频模块*/
module v_div(
input clk_50MHz,
input rst,
output reg clk_1Hz
);
reg [24:0] cnt;//计数器
initial
begin
clk_1Hz<=0;
cnt<=0;
end
always @(posedge clk_50MHz or negedge rst)
begin
if(!rst)
begin
clk_1Hz<=0;
cnt<=0;
end
else if(cnt==24999999)
begin
clk_1Hz<=~clk_1Hz;
cnt<=0;
end
else
cnt<=cnt+1;
end
endmodule
我做的仿真波形如下: