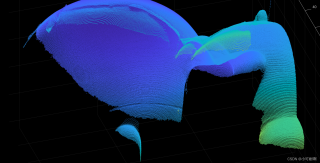
图1
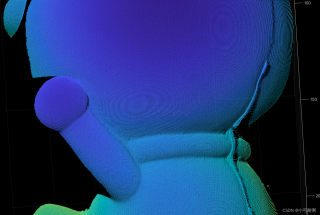
图2
图片1和2是一幅点云图,现在我正在通过采集制作标签,可是从图1的角度来看点云图上好像有条纹,请问,用这种点云生成的深度图可以作为标签吗,我的点云图是由条纹图利用相移法生成的,深度图由点云图生成该怎么样做呢

 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
针对你的问题,从点云生成深度图的过程中出现条纹现象,这通常是由于传感器(如激光雷达或深度相机)的固有特性、采样不均匀、噪声干扰或数据处理算法缺陷所导致的。对于是否可以将这样的深度图用作标签,答案取决于你的具体应用场景和要求。
如果条纹对最终任务的影响不大,比如在进行大尺度场景理解或语义分割时,只要整体形状和距离信息相对准确,那么即使存在一定程度的条纹,仍然可以作为训练数据使用。但在需要高精度局部细节的任务中,如细粒度物体识别或3D重建,这些条纹可能会引入误差,降低模型性能,这种情况下就需要对原始点云数据进行预处理以消除或减轻条纹影响。
以下是一种可能的预处理方法示例,使用Python的Open3D库对点云数据进行平滑处理:
import open3d as o3d
# 假设你已经加载了点云数据到pcd变量中
# pcd = o3d.io.read_point_cloud('path_to_your_pcd_file.pcd')
# 使用voxel_down_sample进行降采样,有助于减少噪声和条纹
voxel_size = 0.01 # 根据实际情况调整这个参数
downsampled_pcd = pcd.voxel_down_sample(voxel_size=voxel_size)
# 使用统计滤波器进行平滑处理
radius = voxel_size * 2 # 可根据实际效果调整半径大小
statistical_filter = o3d.geometry.StatisticalOutlierRemoval(
radius=radius,
mean_k=50, # 考虑邻域内点的数量
std_deviation_mul_thresh=1.0) # 标准差倍数阈值
filtered_pcd = statistical_filter.filter(downsampled_pcd)
# 将过滤后的点云转换为深度图
depth_image = o3d.geometry.PointCloud.to_depth_image(filtered_pcd, intrinsic_matrix)
# 进一步,你可以考虑应用其他滤波方法,例如双边滤波等来优化深度图质量
请注意,上述代码仅是一个简化示例,并未包含读取和显示图像的具体步骤。你需要提供正确的相机内参矩阵intrinsic_matrix以便将点云投影到深度图上。同时,针对特定类型的条纹,可能还需要针对性地设计或选择适合的去噪和平滑算法。
如果你提供的图片能直接反映点云数据,则建议进一步分析条纹产生的原因,针对性地解决问题。如果条纹是硬件设备造成的物理效应,可能需要通过硬件升级或校准来改善;如果是软件处理过程中产生的,则应优化相应的数据处理算法。
分享 修改了问题
3月7日
创建了问题
3月7日
修改了问题
3月7日
创建了问题
3月7日

