
博主您好,我想请问一下您的Ubuntu、OpenCV以及ROS是什么版本?我在跑cam_lidar_calibration项目时,输入快速启动的命令后roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=true,代码报错,网上也没有找到解决方法,想请教一下是什么原因?
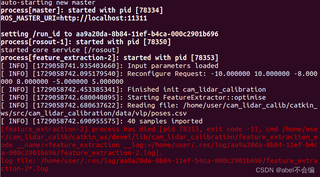
[feature_extraction-2] process has died [pid 78353, exit code -11, cmd /home/user/cam_lidar_calib/catkin_ws/devel/lib/cam_lidar_calibration/feature_extraction_node __name:=feature_extraction __log:=/home/user/.ros/log/aa9a20da-8b84-11ef-b4ca-000c2901b696/feature_extraction-2.log].
log file: /home/user/.ros/log/aa9a20da-8b84-11ef-b4ca-000c2901b696/feature_extraction-2*.log
我对应的是Ubuntu18.04版本,OpenCV我尝试过4.10.0和3.4.16以及现在的4.5.5,在ROS Melodic中进行测试,均失败。
项目地址https://github.com/acfr/cam_lidar_calibration.git
十分感谢!






