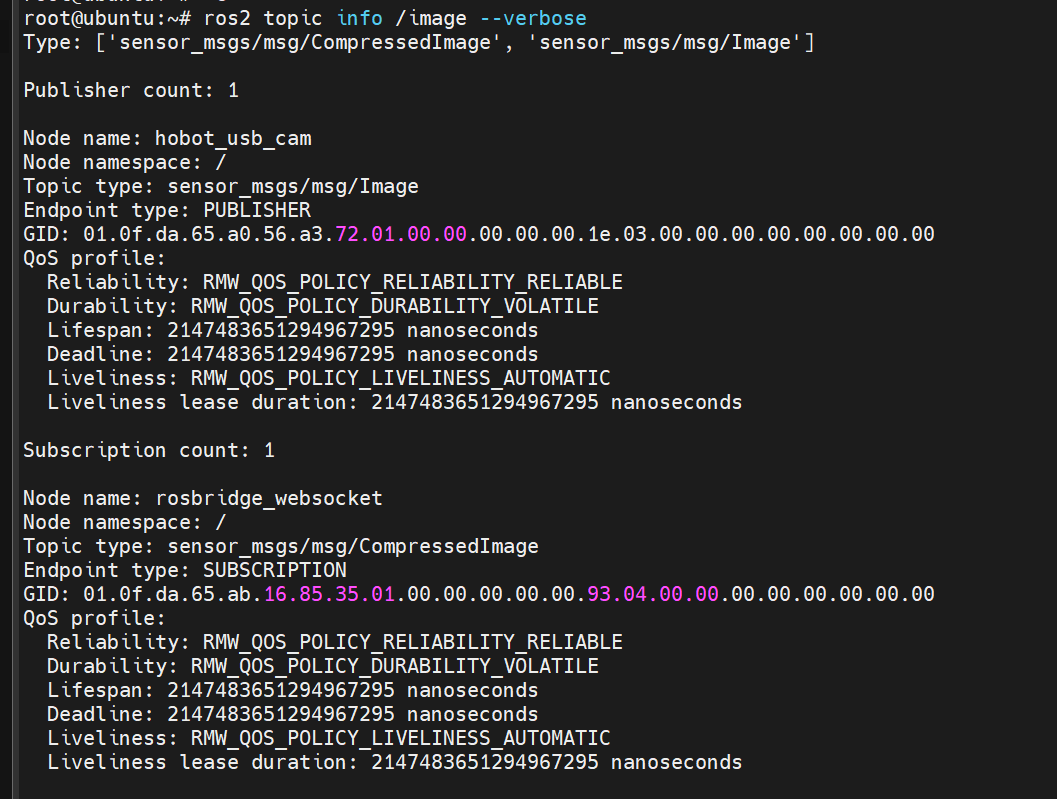
有没有佬能看一下这个消息类型不一样怎么搞呀,刚入门的自己琢磨好久都不知道咋办,在网上也没找到相关资料

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
从你的描述来看,问题的核心是“消息类型不一致”,这通常是ROS(Robot Operating System)开发中常见的问题之一。以下是一些可能的原因和解决方法:
发布者和订阅者的消息类型不匹配
sensor_msgs/Image类型,而订阅者却期望std_msgs/String类型,就会导致错误。消息文件路径配置错误
消息版本不一致
代码中未正确声明消息类型
rostopic type /topic_name
rosmsg show message_type
假设发布者发送的是sensor_msgs/Image类型,而订阅者期望std_msgs/String类型,你需要确保两者一致。以下是示例代码:
发布者代码:
import rospy
from sensor_msgs.msg import Image
def publish_image():
rospy.init_node('image_publisher', anonymous=True)
pub = rospy.Publisher('/camera/image_raw', Image, queue_size=10)
rate = rospy.Rate(1) # 1 Hz
while not rospy.is_shutdown():
# 创建一个Image消息对象
img_msg = Image()
img_msg.header.stamp = rospy.Time.now()
img_msg.height = 480
img_msg.width = 640
img_msg.encoding = 'bgr8'
img_msg.is_bigendian = False
img_msg.step = 640 * 3
img_msg.data = [255] * (640 * 480 * 3) # 示例数据
pub.publish(img_msg)
rate.sleep()
if __name__ == '__main__':
try:
publish_image()
except rospy.ROSInterruptException:
pass
订阅者代码:
import rospy
from sensor_msgs.msg import Image
def callback(data):
rospy.loginfo("Received image data")
def subscribe_image():
rospy.init_node('image_subscriber', anonymous=True)
rospy.Subscriber('/camera/image_raw', Image, callback)
rospy.spin()
if __name__ == '__main__':
subscribe_image()
如果你需要自定义消息类型,可以按照以下步骤操作:
创建一个自定义消息文件:
cd ~/catkin_ws/src/your_package/
mkdir msg
echo "string data" > msg/MyCustomMsg.msg
修改CMakeLists.txt文件:
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation
)
add_message_files(
FILES
MyCustomMsg.msg
)
generate_messages(DEPENDENCIES std_msgs)
catkin_package(
CATKIN_DEPENDS roscpp std_msgs message_runtime
)
编译并重新启动节点:
catkin_make
source devel/setup.bash
确保ROS_PACKAGE_PATH包含了所有需要的消息文件路径:
echo $ROS_PACKAGE_PATH
rostopic echo检查主题数据:
rostopic echo /topic_name
rqt_graph查看节点和话题的关系:
rqt_graph
如果你的问题是“消息类型不一致”,请按照以下步骤逐一排查:
如果还有问题,请提供更多细节(如代码片段、错误日志等),我可以进一步帮助你!
分享 修改了问题
5月17日
创建了问题
5月17日
修改了问题
5月17日
创建了问题
5月17日


