
python+opencv读取视频中手上滑落的物体,mog2背景建模的怎么去掉干扰的阴影,有手臂动的阴影和其它噪点(比如灯光),我观察有手臂和手握的阴影,手臂是曲线的,我用二值图发现滑落的物体是白色和对比其它噪点比较亮,怎么识别这个白色亮的物体或者有没有别的方法准确识别这个物体和去干扰

python+opencv读取视频中手上滑落的物体,mog2背景建模的怎么去掉干扰的阴影

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

3条回答 默认 最新

 关注
关注让【宝码香车】来帮你解答,本回答参考DeepSeek编写,并整理提供。
如果还有疑问可以点击头像关注私信或评论。如果答案让您满意,请采纳、点赞、关注,非常感谢!
Python+OpenCV 去除 MOG2 背景建模中的阴影干扰
问题分析
您在使用 MOG2 背景建模时遇到两个主要干扰:
- 手臂移动产生的阴影
- 其他噪点(如灯光变化)
目标物体特征:
- 在二值图中呈现白色
- 比其他噪点更亮
解决方案
1. 优化 MOG2 参数
import cv2 # 初始化 MOG2 背景减除器 backSub = cv2.createBackgroundSubtractorMOG2( history=500, # 历史帧数,值越大对光照变化越稳定 varThreshold=36, # 方差阈值,值越大越能过滤小噪点 detectShadows=True # 启用阴影检测 ) backSub.setShadowValue(0) # 将阴影部分设为黑色(0) backSub.setShadowThreshold(0.5) # 阴影阈值(0-1),值越小阴影检测越严格2. 后处理流程
def process_frame(frame): # 背景减除 fg_mask = backSub.apply(frame) # 二值化处理 _, binary = cv2.threshold(fg_mask, 200, 255, cv2.THRESH_BINARY) # 形态学操作去除小噪点 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5)) cleaned = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel) # 寻找轮廓 contours, _ = cv2.findContours(cleaned, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 筛选轮廓(基于面积、亮度等特征) min_area = 100 # 最小面积阈值 max_area = 5000 # 最大面积阈值 valid_contours = [] for cnt in contours: area = cv2.contourArea(cnt) if min_area < area < max_area: # 计算轮廓区域的平均亮度 mask = np.zeros_like(fg_mask) cv2.drawContours(mask, [cnt], -1, 255, -1) mean_val = cv2.mean(frame, mask=mask)[0] if mean_val > 150: # 亮度阈值 valid_contours.append(cnt) return valid_contours3. 替代方法:基于颜色和亮度的检测
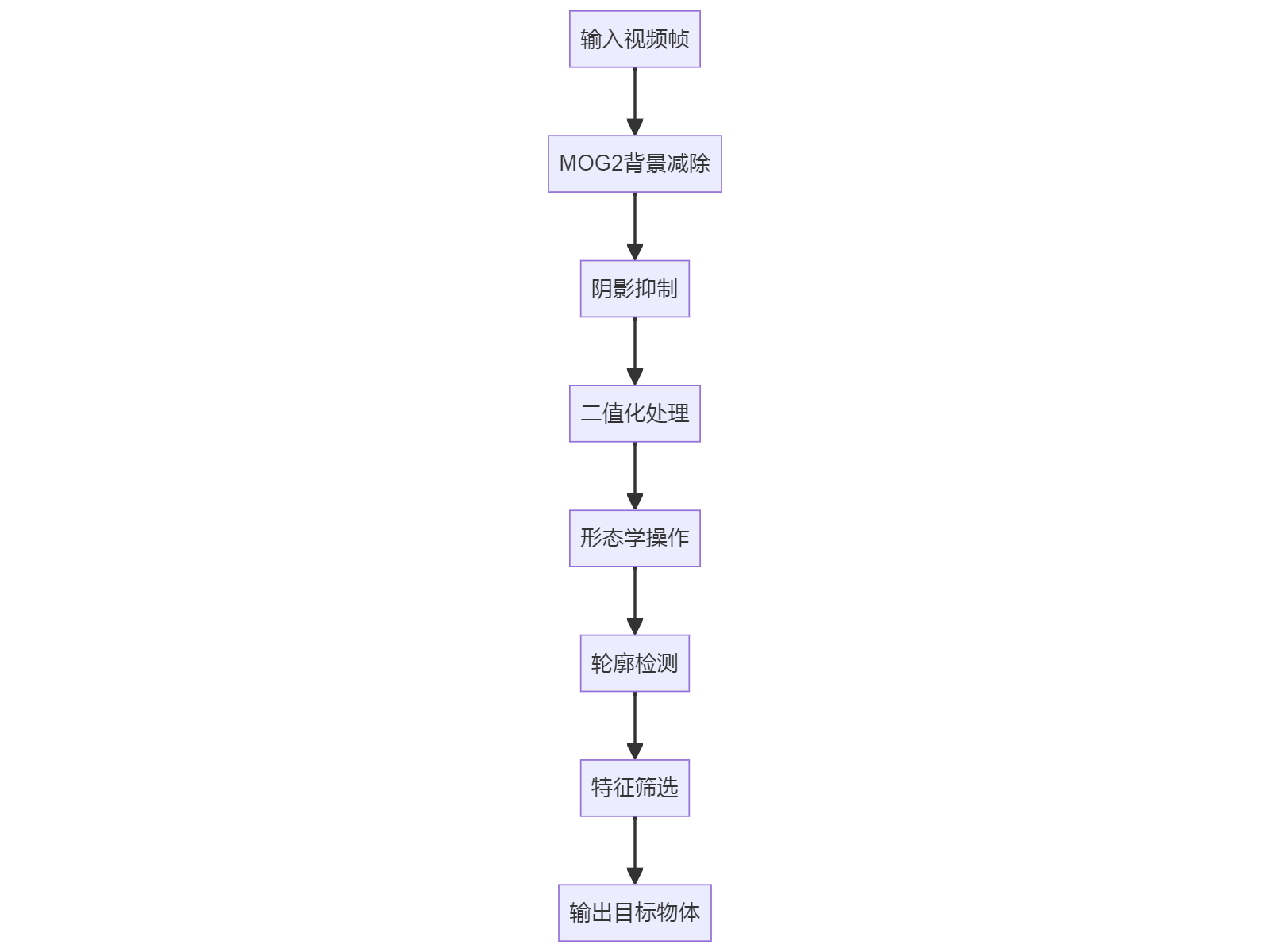
def detect_falling_object(frame): # 转换为HSV色彩空间 hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) # 根据目标物体颜色设置阈值(示例为白色/亮色物体) lower = np.array([0, 0, 200]) # 低阈值(H,S,V) upper = np.array([180, 30, 255]) # 高阈值 # 创建掩膜 mask = cv2.inRange(hsv, lower, upper) # 形态学处理 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5)) mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel) # 寻找轮廓 contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) return contours4. 结合光流法增强检测
def combine_with_optical_flow(prev_frame, current_frame, prev_gray, gray): # 计算光流 flow = cv2.calcOpticalFlowFarneback(prev_gray, gray, None, 0.5, 3, 15, 3, 5, 1.2, 0) # 计算运动幅度 mag, _ = cv2.cartToPolar(flow[...,0], flow[...,1]) # 结合MOG2结果和光流结果 fg_mask = backSub.apply(current_frame) combined = cv2.bitwise_and(fg_mask, (mag > 5).astype(np.uint8) * 255) return combined处理流程
关键优化点
- 阴影处理:
- 调整
setShadowThreshold值 - 将阴影值设为0 (
setShadowValue(0))
- 调整
- 亮度筛选:
- 计算候选区域的平均亮度
- 只保留高亮度区域
- 形态学操作:
- 使用开运算去除小噪点
- 使用椭圆核保持物体形状
- 多方法结合:
- 可以结合背景减除和颜色检测的结果
- 使用光流法辅助判断运动物体
完整示例代码
import cv2 import numpy as np # 初始化 backSub = cv2.createBackgroundSubtractorMOG2(history=500, varThreshold=36, detectShadows=True) backSub.setShadowValue(0) backSub.setShadowThreshold(0.4) cap = cv2.VideoCapture('input.mp4') prev_gray = None while True: ret, frame = cap.read() if not ret: break gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # MOG2背景减除 fg_mask = backSub.apply(frame) # 二值化 _, binary = cv2.threshold(fg_mask, 200, 255, cv2.THRESH_BINARY) # 形态学处理 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5)) cleaned = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel) # 轮廓检测 contours, _ = cv2.findContours(cleaned, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 筛选轮廓 result = frame.copy() for cnt in contours: area = cv2.contourArea(cnt) if 100 < area < 5000: mask = np.zeros_like(fg_mask) cv2.drawContours(mask, [cnt], -1, 255, -1) mean_val = cv2.mean(frame, mask=mask)[0] if mean_val > 150: x,y,w,h = cv2.boundingRect(cnt) cv2.rectangle(result, (x,y), (x+w,y+h), (0,255,0), 2) # 显示结果 cv2.imshow('Result', result) if cv2.waitKey(30) & 0xFF == ord('q'): break cap.release() cv2.destroyAllWindows()通过以上方法,您可以有效地区分目标物体和干扰阴影/噪点。根据实际场景,可能需要调整阈值参数以获得最佳效果。
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
- 2025-05-31 17:27bug菌¹的博客 本文收录于《全栈Bug调优(实战版)》专栏,致力于分享我在项目实战过程中遇到的各类Bug及其原因,并提供切实有效的解决方案。无论你是初学者还是经验丰富的开发者,本文将为你指引出一条更高效的Bug修复之路,助你...
- 2021-01-22 19:02综上所述,Python和OpenCV结合可以有效地实现阴影去除,通过一系列图像处理技术,提高图像的可读性和可用性。通过深入研究和实践该项目,你可以掌握这一技术,并将其应用于自己的图像处理项目中。
- 2018-04-28 00:02python+opencv识别出物体颜色(红白黑蓝绿...)并二维定位出颜色物体坐标.
- 2022-02-07 15:21ReadyGo!!!的博客 python+OpenCV笔记(三十七):检测运动物体——使用MOG/KNN背景差分器
- 2021-04-05 23:20星球旁观生的博客 python + opencv 读取视频中的字幕(这里读取摄像头的时间) import cv2 from PIL import Image video_filename = 'rtsp://xxxx/xx/xx' videoCap = cv2.VideoCapture(video_filename) # 帧频 fps = videoCap.get(cv...
- 2023-09-04 23:46哦里 哦里哦里给的博客 在使用yolov5做物体检测中,需要拉取视频流。分解任务第一步则是需要使用opencv读取rtsp流,只要拿到每一帧图片在进行推理显示即可。
- 2022-08-01 10:44点亮~黑夜的博客 python opencv解决读取和保存图片的中文路径问题
- 2022-02-23 22:00nicec1的博客 视频读取 ●cv2.VideoCapture可以捕获摄像头, 用数字来控制不同的设备,例如0,1。 ●如果是视频文件,直接指定好路径即可。 import cv2 #opencv默认读取格式是BGR vc = cv2.VideoCapture('test.mp4') #检查是否...
- 2022-07-21 17:05Mr.狐友的博客 (0,255,0), font=font) # 参数1:打印坐标,参数2:文本,参数3:字体颜色,参数4:字体 #PIL图片转cv2 图片 cv2charimg = cv2.cvtColor(np.array(pilimg), cv2.COLOR_RGB2BGR) return cv2charimg #图像去噪灰度...
- 2024-10-04 10:17一只蜗牛儿的博客 OpenCV(Open Source Computer Vision Library)是一个强大的计算机视觉库,支持多种语言,如 C++、Python 和 Java 等。它包含了几百个图像处理和计算机视觉的函数,能够处理从简单的图像读取与显示,到复杂的机器...
- 没有解决我的问题, 去提问


问题事件
 系统已结题
6月20日
系统已结题
6月20日 已采纳回答
6月12日
已采纳回答
6月12日-
创建了问题
5月30日