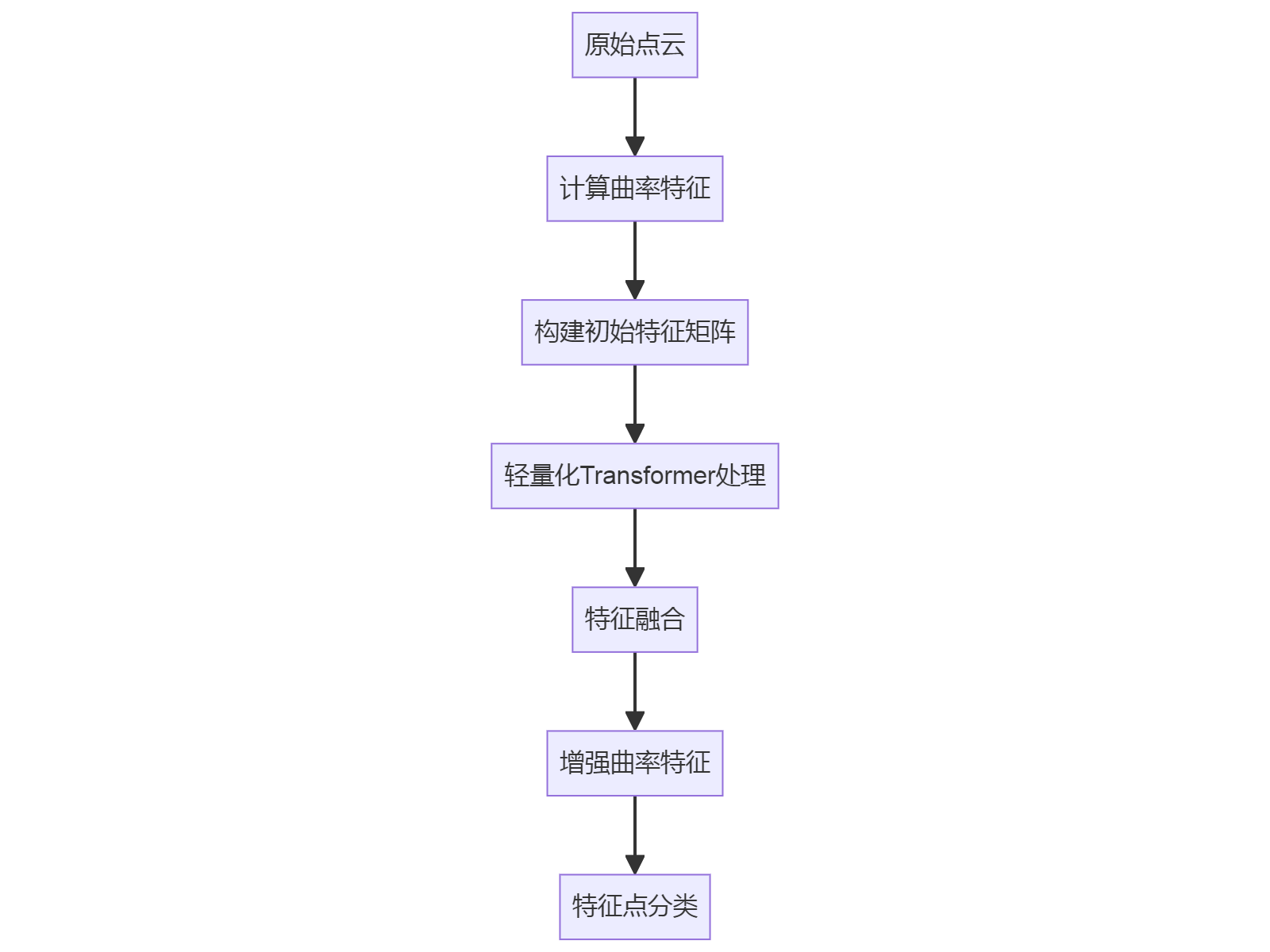
修改代码使transformer轻量化自主意力机制特征提取与曲率特征提取融合,使下述代码在KITTI数据集00序列比原始代码更加优化(有偿)
// This is an advanced implementation of the algorithm described in the following paper:
// J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time.
// Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014.
// Modifier: Tong Qin qintonguav@gmail.com
// Shaozu Cao saozu.cao@connect.ust.hk
// Copyright 2013, Ji Zhang, Carnegie Mellon University
// Further contributions copyright (c) 2016, Southwest Research Institute
// All rights reserved.
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
//
// 1. Redistributions of source code must retain the above copyright notice,
// this list of conditions and the following disclaimer.
// 2. Redistributions in binary form must reproduce the above copyright notice,
// this list of conditions and the following disclaimer in the documentation
// and/or other materials provided with the distribution.
// 3. Neither the name of the copyright holder nor the names of its
// contributors may be used to endorse or promote products derived from this
// software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
// AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
// IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
// ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE
// LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
// CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
// SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
// INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
// CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
// ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
// POSSIBILITY OF SUCH DAMAGE.
#include <cmath>
#include <vector>
#include <string>
#include "aloam_velodyne/common.h"
#include "aloam_velodyne/tic_toc.h"
#include <nav_msgs/Odometry.h>
#include <opencv2/imgproc.hpp>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <sensor_msgs/PointCloud2.h>
#include <tf/transform_datatypes.h>
#include <tf/transform_broadcaster.h>
using std::atan2;
using std::cos;
using std::sin;
const double scanPeriod = 0.1;
const int systemDelay = 0;
int systemInitCount = 0;
bool systemInited = false;
int N_SCANS = 0;
float cloudCurvature[400000];
int cloudSortInd[400000];
int cloudNeighborPicked[400000];
int cloudLabel[400000];
bool comp (int i,int j) { return (cloudCurvature[i]<cloudCurvature[j]); }
ros::Publisher pubLaserCloud;
ros::Publisher pubCornerPointsSharp;
ros::Publisher pubCornerPointsLessSharp;
ros::Publisher pubSurfPointsFlat;
ros::Publisher pubSurfPointsLessFlat;
ros::Publisher pubRemovePoints;
std::vector<ros::Publisher> pubEachScan;
bool PUB_EACH_LINE = false;
double MINIMUM_RANGE = 0.1;
template <typename PointT>
void removeClosedPointCloud(const pcl::PointCloud<PointT> &cloud_in,
pcl::PointCloud<PointT> &cloud_out, float thres)
{
if (&cloud_in != &cloud_out)
{
cloud_out.header = cloud_in.header;
cloud_out.points.resize(cloud_in.points.size());
}
size_t j = 0;
for (size_t i = 0; i < cloud_in.points.size(); ++i)
{
if (cloud_in.points[i].x * cloud_in.points[i].x + cloud_in.points[i].y * cloud_in.points[i].y + cloud_in.points[i].z * cloud_in.points[i].z < thres * thres)
continue;
cloud_out.points[j] = cloud_in.points[i];
j++;
}
if (j != cloud_in.points.size())
{
cloud_out.points.resize(j);
}
cloud_out.height = 1;
cloud_out.width = static_cast<uint32_t>(j);
cloud_out.is_dense = true;
}
void laserCloudHandler(const sensor_msgs::PointCloud2ConstPtr &laserCloudMsg)
{
if (!systemInited)
{
systemInitCount++;
if (systemInitCount >= systemDelay)
{
systemInited = true;
}
else
return;
}
TicToc t_whole;
TicToc t_prepare;
std::vector<int> scanStartInd(N_SCANS, 0);
std::vector<int> scanEndInd(N_SCANS, 0);
pcl::PointCloud<pcl::PointXYZ> laserCloudIn;
pcl::fromROSMsg(*laserCloudMsg, laserCloudIn);
std::vector<int> indices;
pcl::removeNaNFromPointCloud(laserCloudIn, laserCloudIn, indices);
removeClosedPointCloud(laserCloudIn, laserCloudIn, MINIMUM_RANGE);
int cloudSize = laserCloudIn.points.size();
float startOri = -atan2(laserCloudIn.points[0].y, laserCloudIn.points[0].x);
float endOri = -atan2(laserCloudIn.points[cloudSize - 1].y,
laserCloudIn.points[cloudSize - 1].x) +
2 * M_PI;
if (endOri - startOri > 3 * M_PI)
{
endOri -= 2 * M_PI;
}
else if (endOri - startOri < M_PI)
{
endOri += 2 * M_PI;
}
//printf("end Ori %f\n", endOri);
bool halfPassed = false;
int count = cloudSize;
PointType point;
std::vector<pcl::PointCloud<PointType>> laserCloudScans(N_SCANS);
for (int i = 0; i < cloudSize; i++)
{
point.x = laserCloudIn.points[i].x;
point.y = laserCloudIn.points[i].y;
point.z = laserCloudIn.points[i].z;
float angle = atan(point.z / sqrt(point.x * point.x + point.y * point.y)) * 180 / M_PI;
int scanID = 0;
if (N_SCANS == 16)
{
scanID = int((angle + 15) / 2 + 0.5);
if (scanID > (N_SCANS - 1) || scanID < 0)
{
count--;
continue;
}
}
else if (N_SCANS == 32)
{
scanID = int((angle + 92.0/3.0) * 3.0 / 4.0);
if (scanID > (N_SCANS - 1) || scanID < 0)
{
count--;
continue;
}
}
else if (N_SCANS == 64)
{
if (angle >= -8.83)
scanID = int((2 - angle) * 3.0 + 0.5);
else
scanID = N_SCANS / 2 + int((-8.83 - angle) * 2.0 + 0.5);
// use [0 50] > 50 remove outlies
if (angle > 2 || angle < -24.33 || scanID > 50 || scanID < 0)
{
count--;
continue;
}
}
else
{
printf("wrong scan number\n");
ROS_BREAK();
}
//printf("angle %f scanID %d \n", angle, scanID);
float ori = -atan2(point.y, point.x);
if (!halfPassed)
{
if (ori < startOri - M_PI / 2)
{
ori += 2 * M_PI;
}
else if (ori > startOri + M_PI * 3 / 2)
{
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI)
{
halfPassed = true;
}
}
else
{
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2)
{
ori += 2 * M_PI;
}
else if (ori > endOri + M_PI / 2)
{
ori -= 2 * M_PI;
}
}
float relTime = (ori - startOri) / (endOri - startOri);
point.intensity = scanID + scanPeriod * relTime;
laserCloudScans[scanID].push_back(point);
}
cloudSize = count;
printf("points size %d \n", cloudSize);
pcl::PointCloud<PointType>::Ptr laserCloud(new pcl::PointCloud<PointType>());
for (int i = 0; i < N_SCANS; i++)
{
scanStartInd[i] = laserCloud->size() + 5;
*laserCloud += laserCloudScans[i];
scanEndInd[i] = laserCloud->size() - 6;
}
printf("prepare time %f \n", t_prepare.toc());
for (int i = 5; i < cloudSize - 5; i++)
{
float diffX = laserCloud->points[i - 5].x + laserCloud->points[i - 4].x + laserCloud->points[i - 3].x + laserCloud->points[i - 2].x + laserCloud->points[i - 1].x - 10 * laserCloud->points[i].x + laserCloud->points[i + 1].x + laserCloud->points[i + 2].x + laserCloud->points[i + 3].x + laserCloud->points[i + 4].x + laserCloud->points[i + 5].x;
float diffY = laserCloud->points[i - 5].y + laserCloud->points[i - 4].y + laserCloud->points[i - 3].y + laserCloud->points[i - 2].y + laserCloud->points[i - 1].y - 10 * laserCloud->points[i].y + laserCloud->points[i + 1].y + laserCloud->points[i + 2].y + laserCloud->points[i + 3].y + laserCloud->points[i + 4].y + laserCloud->points[i + 5].y;
float diffZ = laserCloud->points[i - 5].z + laserCloud->points[i - 4].z + laserCloud->points[i - 3].z + laserCloud->points[i - 2].z + laserCloud->points[i - 1].z - 10 * laserCloud->points[i].z + laserCloud->points[i + 1].z + laserCloud->points[i + 2].z + laserCloud->points[i + 3].z + laserCloud->points[i + 4].z + laserCloud->points[i + 5].z;
cloudCurvature[i] = diffX * diffX + diffY * diffY + diffZ * diffZ;
cloudSortInd[i] = i;
cloudNeighborPicked[i] = 0;
cloudLabel[i] = 0;
}
TicToc t_pts;
pcl::PointCloud<PointType> cornerPointsSharp;
pcl::PointCloud<PointType> cornerPointsLessSharp;
pcl::PointCloud<PointType> surfPointsFlat;
pcl::PointCloud<PointType> surfPointsLessFlat;
float t_q_sort = 0;
for (int i = 0; i < N_SCANS; i++)
{
if( scanEndInd[i] - scanStartInd[i] < 6)
continue;
pcl::PointCloud<PointType>::Ptr surfPointsLessFlatScan(new pcl::PointCloud<PointType>);
for (int j = 0; j < 6; j++)
{
int sp = scanStartInd[i] + (scanEndInd[i] - scanStartInd[i]) * j / 6;
int ep = scanStartInd[i] + (scanEndInd[i] - scanStartInd[i]) * (j + 1) / 6 - 1;
TicToc t_tmp;
std::sort (cloudSortInd + sp, cloudSortInd + ep + 1, comp);
t_q_sort += t_tmp.toc();
int largestPickedNum = 0;
for (int k = ep; k >= sp; k--)
{
int ind = cloudSortInd[k];
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] > 0.1)
{
largestPickedNum++;
if (largestPickedNum <= 2)
{
cloudLabel[ind] = 2;
cornerPointsSharp.push_back(laserCloud->points[ind]);
cornerPointsLessSharp.push_back(laserCloud->points[ind]);
}
else if (largestPickedNum <= 20)
{
cloudLabel[ind] = 1;
cornerPointsLessSharp.push_back(laserCloud->points[ind]);
}
else
{
break;
}
cloudNeighborPicked[ind] = 1;
for (int l = 1; l <= 5; l++)
{
float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l - 1].x;
float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l - 1].y;
float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l - 1].z;
if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05)
{
break;
}
cloudNeighborPicked[ind + l] = 1;
}
for (int l = -1; l >= -5; l--)
{
float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l + 1].x;
float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l + 1].y;
float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l + 1].z;
if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05)
{
break;
}
cloudNeighborPicked[ind + l] = 1;
}
}
}
int smallestPickedNum = 0;
for (int k = sp; k <= ep; k++)
{
int ind = cloudSortInd[k];
if (cloudNeighborPicked[ind] == 0 &&
cloudCurvature[ind] < 0.1)
{
cloudLabel[ind] = -1;
surfPointsFlat.push_back(laserCloud->points[ind]);
smallestPickedNum++;
if (smallestPickedNum >= 4)
{
break;
}
cloudNeighborPicked[ind] = 1;
for (int l = 1; l <= 5; l++)
{
float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l - 1].x;
float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l - 1].y;
float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l - 1].z;
if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05)
{
break;
}
cloudNeighborPicked[ind + l] = 1;
}
for (int l = -1; l >= -5; l--)
{
float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l + 1].x;
float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l + 1].y;
float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l + 1].z;
if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05)
{
break;
}
cloudNeighborPicked[ind + l] = 1;
}
}
}
for (int k = sp; k <= ep; k++)
{
if (cloudLabel[k] <= 0)
{
surfPointsLessFlatScan->push_back(laserCloud->points[k]);
}
}
}
pcl::PointCloud<PointType> surfPointsLessFlatScanDS;
pcl::VoxelGrid<PointType> downSizeFilter;
downSizeFilter.setInputCloud(surfPointsLessFlatScan);
downSizeFilter.setLeafSize(0.2, 0.2, 0.2);
downSizeFilter.filter(surfPointsLessFlatScanDS);
surfPointsLessFlat += surfPointsLessFlatScanDS;
}
printf("sort q time %f \n", t_q_sort);
printf("seperate points time %f \n", t_pts.toc());
sensor_msgs::PointCloud2 laserCloudOutMsg;
pcl::toROSMsg(*laserCloud, laserCloudOutMsg);
laserCloudOutMsg.header.stamp = laserCloudMsg->header.stamp;
laserCloudOutMsg.header.frame_id = "camera_init";
pubLaserCloud.publish(laserCloudOutMsg);
sensor_msgs::PointCloud2 cornerPointsSharpMsg;
pcl::toROSMsg(cornerPointsSharp, cornerPointsSharpMsg);
cornerPointsSharpMsg.header.stamp = laserCloudMsg->header.stamp;
cornerPointsSharpMsg.header.frame_id = "camera_init";
pubCornerPointsSharp.publish(cornerPointsSharpMsg);
sensor_msgs::PointCloud2 cornerPointsLessSharpMsg;
pcl::toROSMsg(cornerPointsLessSharp, cornerPointsLessSharpMsg);
cornerPointsLessSharpMsg.header.stamp = laserCloudMsg->header.stamp;
cornerPointsLessSharpMsg.header.frame_id = "camera_init";
pubCornerPointsLessSharp.publish(cornerPointsLessSharpMsg);
sensor_msgs::PointCloud2 surfPointsFlat2;
pcl::toROSMsg(surfPointsFlat, surfPointsFlat2);
surfPointsFlat2.header.stamp = laserCloudMsg->header.stamp;
surfPointsFlat2.header.frame_id = "camera_init";
pubSurfPointsFlat.publish(surfPointsFlat2);
sensor_msgs::PointCloud2 surfPointsLessFlat2;
pcl::toROSMsg(surfPointsLessFlat, surfPointsLessFlat2);
surfPointsLessFlat2.header.stamp = laserCloudMsg->header.stamp;
surfPointsLessFlat2.header.frame_id = "camera_init";
pubSurfPointsLessFlat.publish(surfPointsLessFlat2);
// pub each scam
if(PUB_EACH_LINE)
{
for(int i = 0; i< N_SCANS; i++)
{
sensor_msgs::PointCloud2 scanMsg;
pcl::toROSMsg(laserCloudScans[i], scanMsg);
scanMsg.header.stamp = laserCloudMsg->header.stamp;
scanMsg.header.frame_id = "camera_init";
pubEachScan[i].publish(scanMsg);
}
}
printf("scan registration time %f ms *************\n", t_whole.toc());
if(t_whole.toc() > 100)
ROS_WARN("scan registration process over 100ms");
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "scanRegistration");
ros::NodeHandle nh;
nh.param<int>("scan_line", N_SCANS, 16);
nh.param<double>("minimum_range", MINIMUM_RANGE, 0.1);
printf("scan line number %d \n", N_SCANS);
if(N_SCANS != 16 && N_SCANS != 32 && N_SCANS != 64)
{
printf("only support velodyne with 16, 32 or 64 scan line!");
return 0;
}
ros::Subscriber subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2>("/velodyne_points", 100, laserCloudHandler);
pubLaserCloud = nh.advertise<sensor_msgs::PointCloud2>("/velodyne_cloud_2", 100);
pubCornerPointsSharp = nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_sharp", 100);
pubCornerPointsLessSharp = nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_less_sharp", 100);
pubSurfPointsFlat = nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_flat", 100);
pubSurfPointsLessFlat = nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_less_flat", 100);
pubRemovePoints = nh.advertise<sensor_msgs::PointCloud2>("/laser_remove_points", 100);
if(PUB_EACH_LINE)
{
for(int i = 0; i < N_SCANS; i++)
{
ros::Publisher tmp = nh.advertise<sensor_msgs::PointCloud2>("/laser_scanid_" + std::to_string(i), 100);
pubEachScan.push_back(tmp);
}
}
ros::spin();
return 0;
}