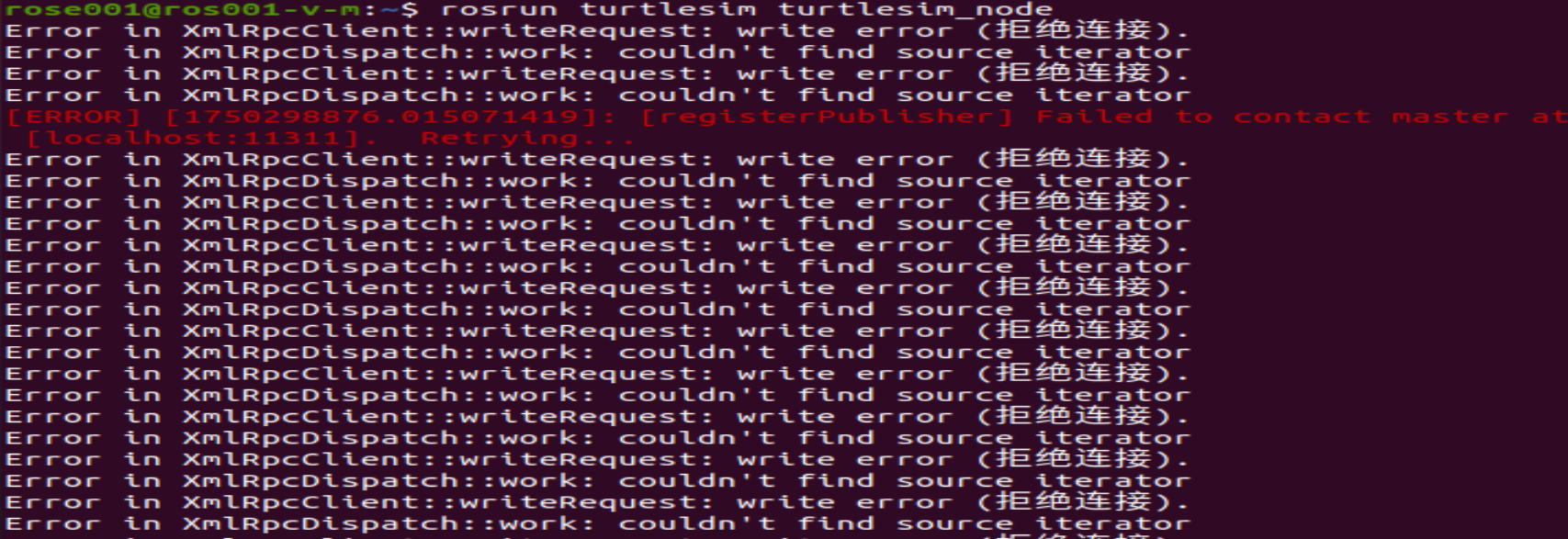
请问这个问题如何解决?rosrun turtlesim turtlesim_node运行出现的问题

请问这个问题如何解决?rosrun turtlesim turtlesim_node运行出现的问题
 分享
分享
上午好☀️☀️☀️️
本答案参考通义千问
根据你的描述,rosrun turtlesim turtlesim_node 运行时出现了错误信息 Error in XmlRpcDispatch::work: couldn't find source iterator。这是一个与 ROS 的 XML-RPC 通信机制相关的错误,通常可能与 ROS Master 或节点间的通信问题有关。
以下是解决问题的步骤和可能的解决方案:
确保 ROS Master 正常启动。可以通过以下命令检查:
roscore
如果 ROS Master 没有正常启动,会导致节点之间的通信失败。
解决方法:
roscore &
rosrun turtlesim turtlesim_node。确保 ROS 环境变量已经正确设置。可以通过以下命令检查:
echo $ROS_MASTER_URI
echo $ROS_IP
echo $ROS_HOSTNAME
解决方法:
ROS_MASTER_URI 没有设置或设置不正确,可以手动设置:
export ROS_MASTER_URI=http://localhost:11311
ROS_IP 或 ROS_HOSTNAME 设置正确。如果你的机器有多块网卡或网络配置复杂,可能导致节点无法正确通信。确保所有节点都在同一个网络中。
解决方法:
ROS_IP 或 ROS_HOSTNAME 设置为正确的 IP 地址。ROS_MASTER_URI 和 ROS_IP 配置一致。有时候,节点可能会因为某些原因挂起或崩溃。可以尝试重启 ROS 节点和服务。
解决方法:
pkill -f ros
roscore &
rosrun turtlesim turtlesim_node
错误信息提到 XmlRpcDispatch,这可能与 XML-RPC 服务端口冲突有关。确保 ROS Master 使用的端口(默认是 11311)没有被其他进程占用。
解决方法:
netstat -tuln | grep 11311
export ROS_MASTER_URI=http://localhost:11312
如果你使用的 ROS 版本较旧,可能存在一些已知的 XML-RPC 问题。确保你的 ROS 版本是最新的。
解决方法:
sudo apt update
sudo apt upgrade
如果上述方法都无法解决问题,可以启用更详细的日志记录来排查问题。
解决方法:
export ROS_LOG_DIR=/tmp/ros_logs
export ROS_DEBUG_LEVEL=debug
tail -f /tmp/ros_logs/*.log
如果你需要手动设置环境变量,可以在 .bashrc 文件中添加以下内容:
export ROS_MASTER_URI=http://localhost:11311
export ROS_IP=$(hostname -I | awk '{print $1}')
然后重新加载配置:
source ~/.bashrc
通过以上步骤,你应该能够解决 Error in XmlRpcDispatch::work: couldn't find source iterator 的问题。如果问题仍然存在,请提供更多上下文信息(例如完整的错误日志),以便进一步分析。
分享 创建了问题
6月19日
创建了问题
6月19日

