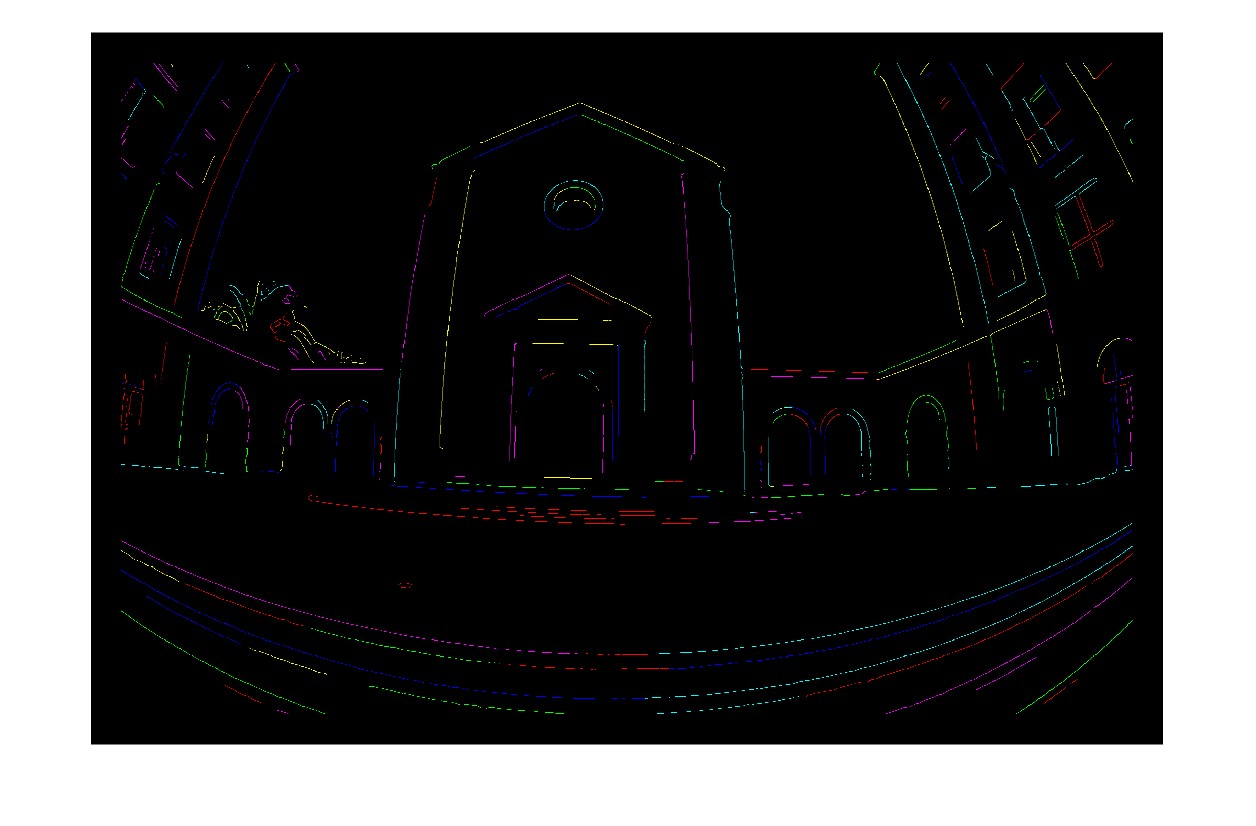
关于镜头畸变导致的图像曲线问题,识别其中图像中的曲线是一个难题吗?我以hough变换为基础进行了改进,识别出来的效果如下,请大家帮忙看看识别的水平怎么样,是很差吗?还是说就没必要进行曲线识别这个工作?


关于镜头畸变导致的图像曲线问题,识别其中图像中的曲线是一个难题吗?我以hough变换为基础进行了改进,识别出来的效果如下,请大家帮忙看看识别的水平怎么样,是很差吗?还是说就没必要进行曲线识别这个工作?
 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
import cv2
import numpy as np
def evaluate_curve_detection(original_image, detected_curves):
# 假设这里有一些标注曲线的方法来获取实际曲线
# 这里简单示例假设实际曲线为白色线条
gray = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
_, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
actual_curves = []
for contour in contours:
epsilon = 0.01 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
if len(approx) > 4: # 简单判断为曲线
actual_curves.append(approx)
correct_count = 0
for detected_curve in detected_curves:
for actual_curve in actual_curves:
if cv2.matchShapes(detected_curve, actual_curve, cv2.CONTOURS_MATCH_I1, 0) < 0.1:
correct_count += 1
accuracy = correct_count / len(actual_curves) if actual_curves else 0
recall = correct_count / len(detected_curves) if detected_curves else 0
false_positive_rate = (len(detected_curves) - correct_count) / len(detected_curves) if detected_curves else 0
return accuracy, recall, false_positive_rate
# 示例使用,假设original_image是原始图像,detected_curves是检测到的曲线(这里简单表示为轮廓)
original_image = cv2.imread('your_image.jpg')
detected_curves = [np.array([[100, 100], [150, 150], [200, 100]])] # 示例检测到的曲线
accuracy, recall, false_positive_rate = evaluate_curve_detection(original_image, detected_curves)
print(f"Accuracy: {accuracy}, Recall: {recall}, False Positive Rate: {false_positive_rate}")
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 创建了问题
7月21日
创建了问题
7月21日

