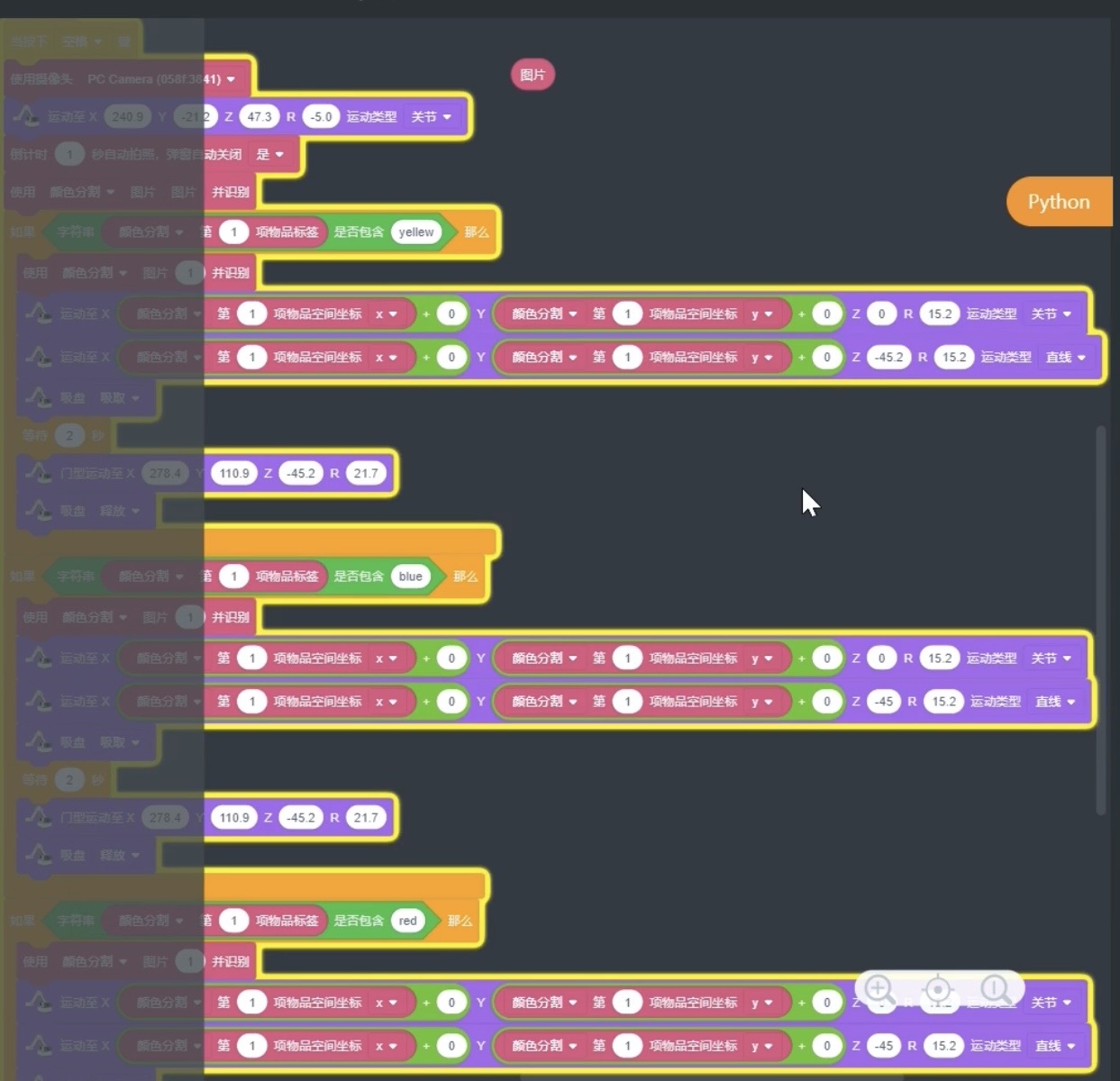
多次调试效果不佳 想求一个简单的万能代码 。°(°¯᷄◠¯᷅°)°。

 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
解决方案
基于Dobot Magician Lite 机械臂实现颜色分拣积木的编程代码是一个复杂的问题,但考虑到你的要求我将给出一个简单的示例代码。你可以使用OpenCV进行颜色检测,并使用Dobot Magician Lite的API进行机械臂的控制。
核心代码
import cv2
import numpy as np
from DobotAPI import Dobot
# 初始化Dobot对象
dobot = Dobot()
# 读取摄像头视频流
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
# 转换为HSV颜色空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 设置色彩阈值(可以根据需求调整)
lower_color = np.array([0, 100, 100])
upper_color = np.array([10, 255, 255])
# Mask
mask = cv2.inRange(hsv, lower_color, upper_color)
# 腐蚀和膨胀
kernel = np.ones((5, 5), np.uint8)
mask = cv2.erode(mask, kernel, iterations=1)
mask = cv2.dilate(mask, kernel, iterations=1)
# 查找色彩检测区域(可以根据需求调整)
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
x, y, w, h = cv2.boundingRect(contour)
if w > 10 and h > 10: # 过滤小区域
# 机械臂移动到检测区域
dobot.movexy(x + w // 2, y + h // 2)
# 机械臂取放积木(具体实现取决于机器臂的类型和结构)
dobot.movef(10) # 向上移动
dobot.movexy(x + w // 2, y)
dobot.movef(-10) # 向下移动
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头
cap.release()
cv2.destroyAllWindows()
注意
分享 创建了问题
9月20日
创建了问题
9月20日


