下午好🌅🌅🌅
本答案参考通义千问
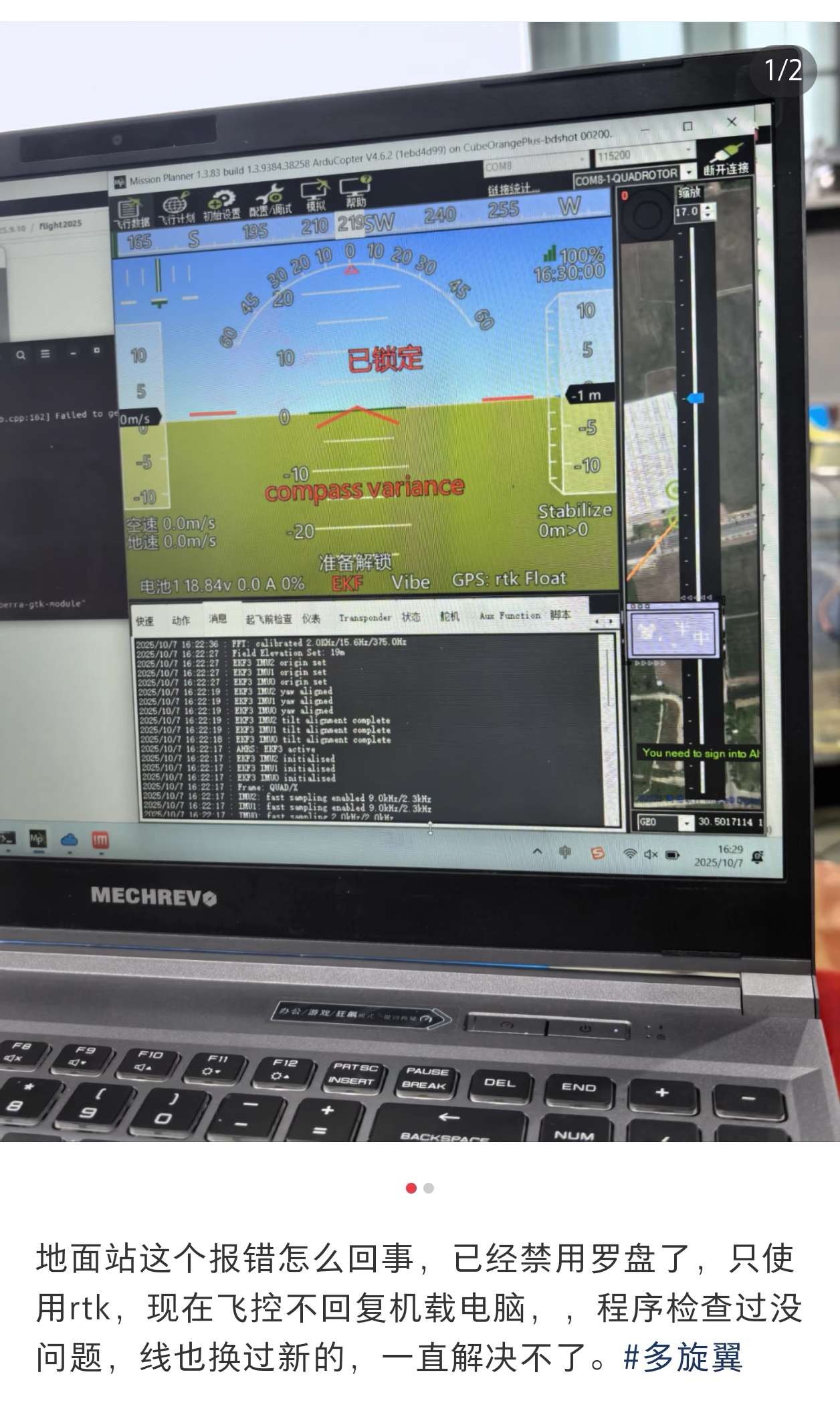
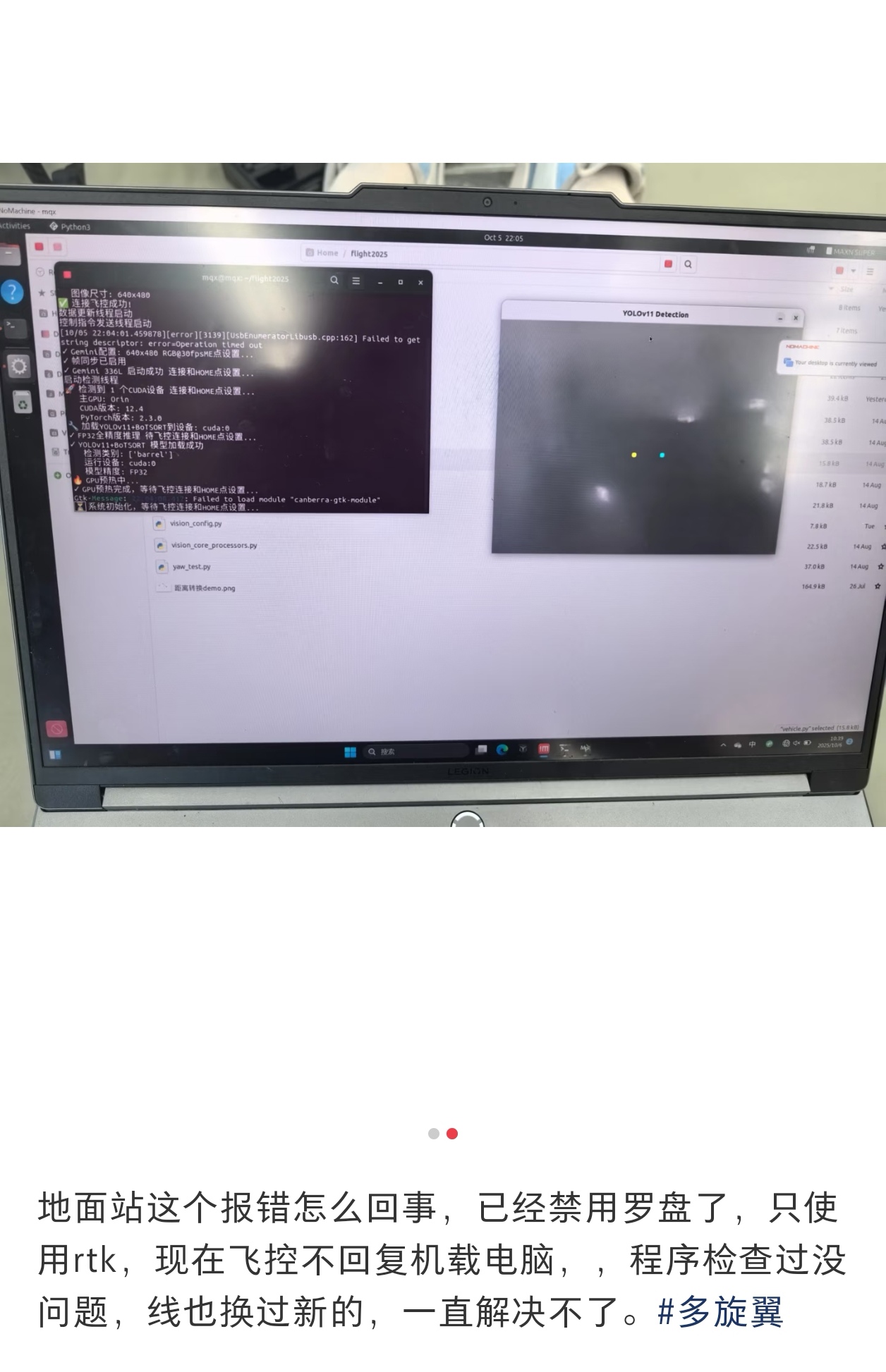
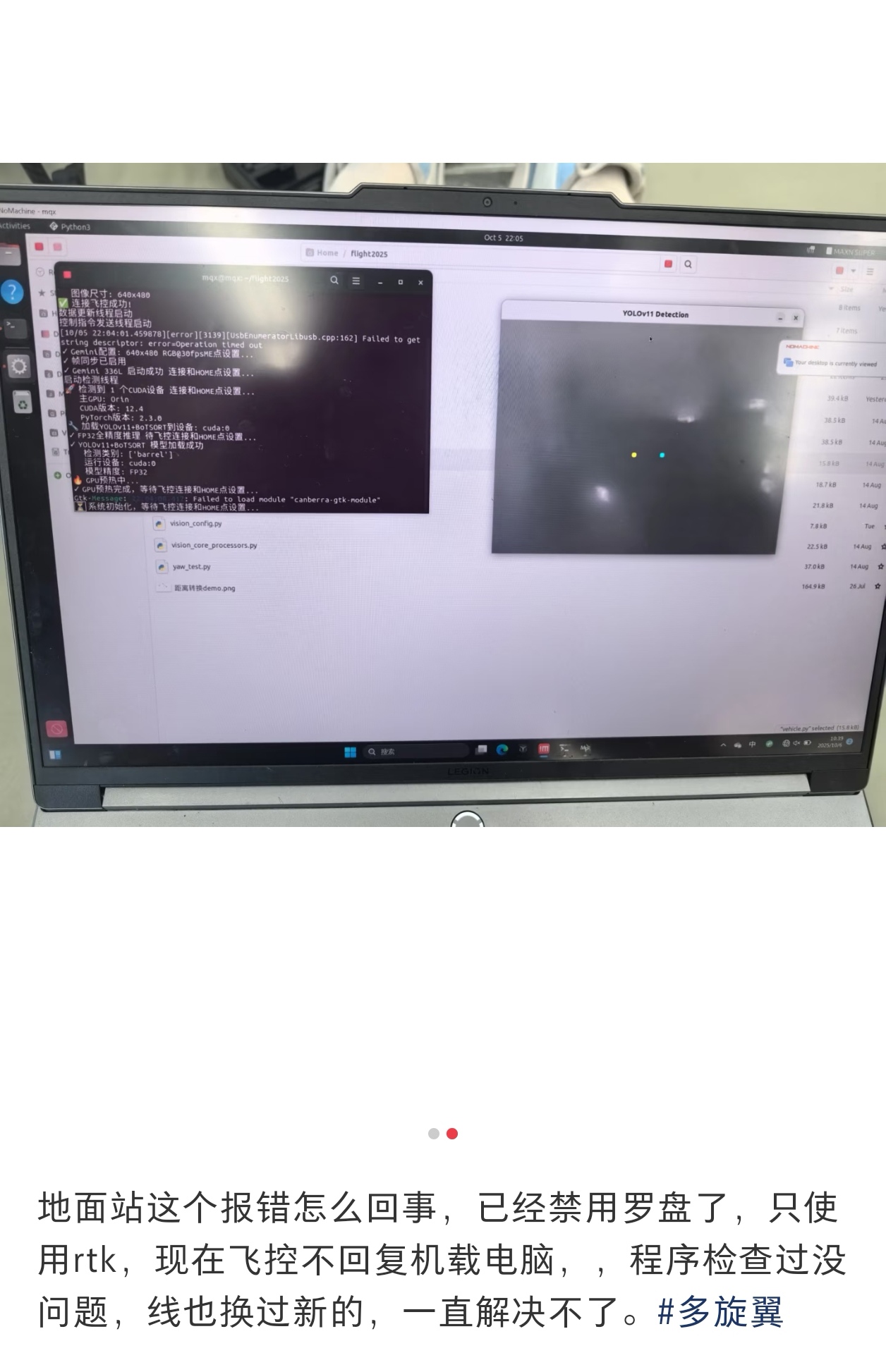
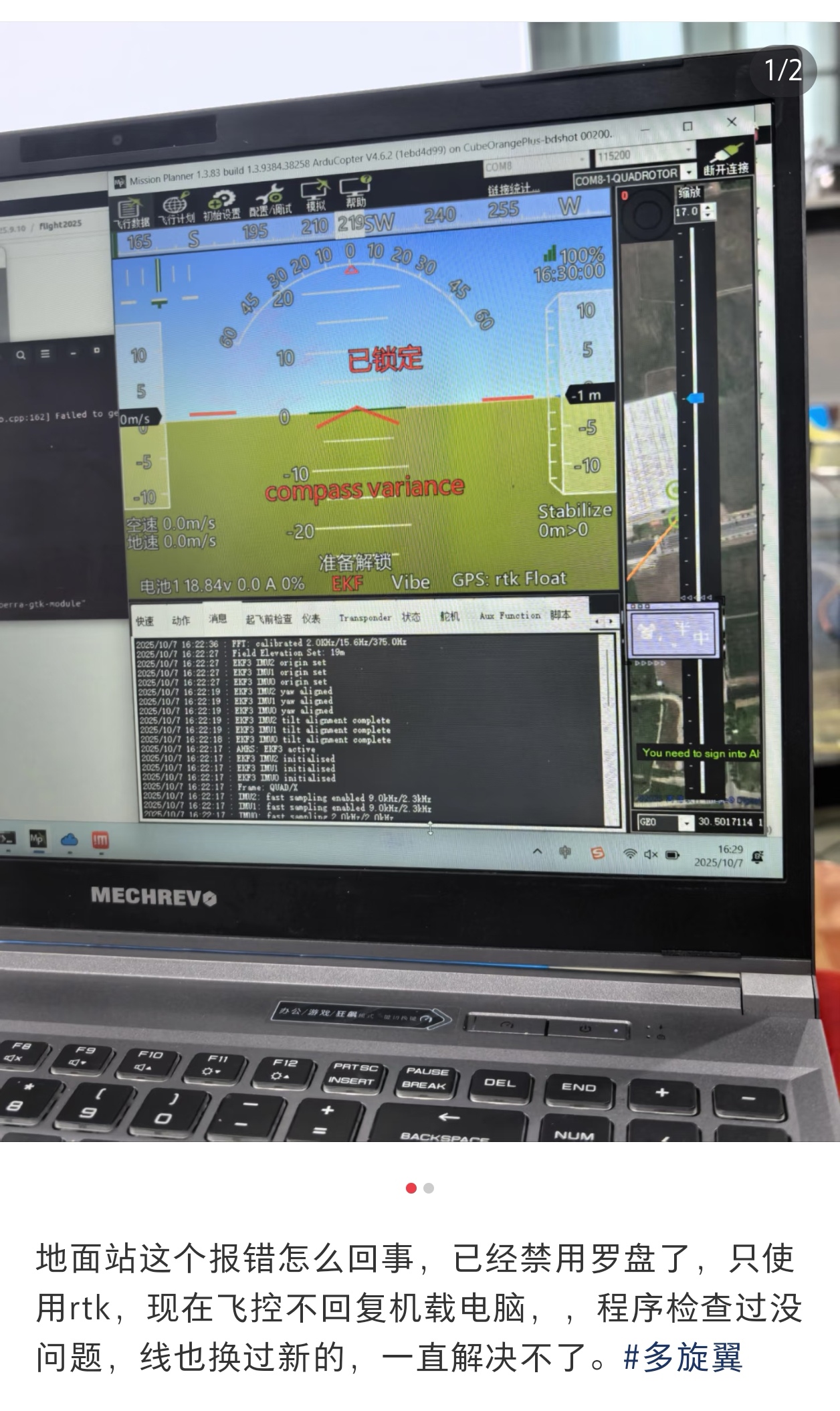
根据你的描述,飞控(Flight Controller)不回复机载电脑(Ground Station),导致无法接收坐标,进而影响飞控解锁。虽然你确认程序没问题、线缆也没问题,但仍存在通信故障。以下是一些可能的原因及解决方案:
一、检查通信协议与波特率设置
重点:飞控和机载电脑之间的通信协议必须一致,否则无法正常通信。
-
确认通信协议:
- 常见的协议有 MAVLink(如 MAVLink 2)、UAVCAN、Serial 等。
- 确保飞控和地面站使用相同的协议。
-
检查波特率(Baud Rate):
- 飞控和地面站的串口波特率必须一致,例如 57600、115200 等。
- 常见错误是双方波特率不同,导致数据无法解析。
-
修改配置(以 PX4 为例):
# 使用 QGroundControl 或命令行工具查看当前波特率
param show SERIAL0_BAUD
# 修改波特率
param set SERIAL0_BAUD 115200
二、检查串口连接与物理接口
重点:即使线缆没有问题,也可能因接口损坏或接触不良导致通信失败。
-
重新插拔串口线:
- 确保串口线牢固插入飞控和机载电脑的 USB/UART 接口。
- 检查是否有松动或氧化现象。
-
更换串口线:
- 即使线缆外观无损,也可能是内部断路或接触不良。
- 尝试使用其他已知正常的串口线。
-
检查飞控的串口引脚:
- 确认飞控的 TX 和 RX 引脚是否正确连接到机载电脑的 RX 和 TX。
- 注意:某些飞控的串口是“反向”的(TX 连 RX,RX 连 TX)。
三、检查飞控固件与版本兼容性
重点:飞控固件版本与地面站软件版本不匹配可能导致通信异常。
-
升级飞控固件:
- 使用 QGroundControl 或 Mission Planner 更新飞控固件至最新稳定版。
- 确保固件支持当前使用的协议(如 MAVLink 2)。
-
检查地面站软件版本:
- 确保地面站软件(如 QGC、Mission Planner)为最新版本。
- 旧版本可能不支持新固件中的功能。
四、检查飞控日志与调试信息
重点:通过日志可以快速定位通信失败的具体原因。
-
查看飞控日志:
- 使用 QGroundControl 查看飞控的日志文件(Log Viewer)。
- 关注是否有以下关键词:
No heartbeat from systemFailed to receive messageSerial communication error
-
启用调试输出:
- 在飞控中开启调试模式,查看串口输出是否有错误提示。
- 例如在 PX4 中可以通过
param set SYS_LOG_LEVEL 3 开启详细日志。
五、检查飞控硬件状态
重点:飞控硬件故障也可能导致通信中断。
-
检查飞控电源:
- 确保飞控供电稳定,电压在正常范围内(如 5V 或 12V)。
- 电源不稳定可能导致飞控重启或通信中断。
-
检查飞控主板:
- 若怀疑硬件故障,可尝试更换飞控板测试。
- 检查飞控上的电容、芯片等是否有烧毁痕迹。
-
检查 GPS 模块:
- 如果 GPS 模块未工作,飞控可能无法发送坐标。
- 确保 GPS 模块正常连接并接收到卫星信号。
六、排查机载电脑端的软件设置
重点:地面站软件配置错误也可能导致通信失败。
-
检查串口选择:
- 在地面站软件中选择正确的串口(COM 口)。
- 确认串口类型(USB 转串口、RS232 等)。
-
检查通信参数:
- 在地面站软件中设置正确的波特率、数据位、停止位和校验位。
- 例如:9600, 8N1(8 bits, No parity, 1 stop bit)。
-
尝试其他地面站软件:
- 使用不同的地面站软件(如 Mission Planner、Betaflight Configurator)测试通信。
- 排除软件兼容性问题。
七、参考官方文档与社区支持
重点:官方文档和社区论坛往往能提供最直接的解决方案。
-
查阅飞控官方文档:
- 如 PX4 官方文档、ArduPilot 官方手册。
- 搜索 “no heartbeat”、“communication failure” 等关键词。
-
加入飞控社区:
- 如 GitHub Issues、Discord 群组、Reddit 社区。
- 提供详细信息(飞控型号、固件版本、错误日志等)寻求帮助。
八、总结:关键排查步骤(有序列表)
- 检查通信协议与波特率设置是否一致。
- 重新插拔串口线,确保连接稳固。
- 更新飞控固件和地面站软件至最新版本。
- 查看飞控日志,寻找通信失败的关键信息。
- 检查飞控硬件状态,排除硬件故障。
- 在地面站软件中确认串口配置是否正确。
- 尝试使用其他地面站软件进行测试。
- 查阅官方文档并联系社区获取支持。
如果你能提供更具体的飞控型号(如 Pixhawk、CubePilot、PX4 等)以及使用的地面站软件(如 QGroundControl、Mission Planner 等),我可以给出更精确的建议。

 分享
分享
 创建了问题
10月7日
创建了问题
10月7日

