我刚着手做传统组合导航数据解析,遇见几个问题,想请教大家!
我想用oxts里面的经纬度海拔和imu的数据算出kitti里程计数据集里面的pose,但是计算的结果存在误差。误差如下:
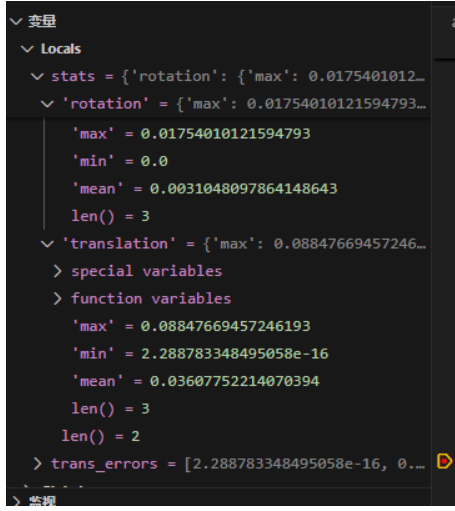
在此我想询问一下,kitti里程计的pose是如何计算出来的呢?有没有好用的方法呢?

我刚着手做传统组合导航数据解析,遇见几个问题,想请教大家!
我想用oxts里面的经纬度海拔和imu的数据算出kitti里程计数据集里面的pose,但是计算的结果存在误差。误差如下:
在此我想询问一下,kitti里程计的pose是如何计算出来的呢?有没有好用的方法呢?
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
Kitti 里程计数据集的pose计算
Kitti 里程计数据集的pose计算通常涉及到IMU数据和GPS数据的融合。IMU数据提供了相对运动的信息,而GPS数据提供了绝对位置的信息。通过融合这两种数据,可以计算出相对位置和姿态的信息,也就是pose。
问题分析
你遇到的问题可能是由于IMU数据和GPS数据的融合过程中出现了误差。可能的原因包括:
解决方案
核心代码
import numpy as np
from scipy.linalg import inv
# IMU数据
imu_data = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
# GPS数据
gps_data = np.array([[10, 20, 30], [40, 50, 60], [70, 80, 90]])
# IMU数据和GPS数据的融合
def fuse_imu_gps(imu_data, gps_data):
# IMU数据的预测
imu_pred = np.dot(imu_data, np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]]))
# GPS数据的更新
gps_upd = np.dot(gps_data, np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]]))
# IMU数据和GPS数据的融合
fused_data = np.dot(imu_pred, inv(np.dot(gps_upd.T, gps_upd))) * gps_upd.T * gps_data
return fused_data
# 融合IMU数据和GPS数据
fused_data = fuse_imu_gps(imu_data, gps_data)
print(fused_data)
注意:上述代码仅供参考,具体的实现细节可能需要根据实际情况进行调整。
分享 创建了问题
11月11日
创建了问题
11月11日

