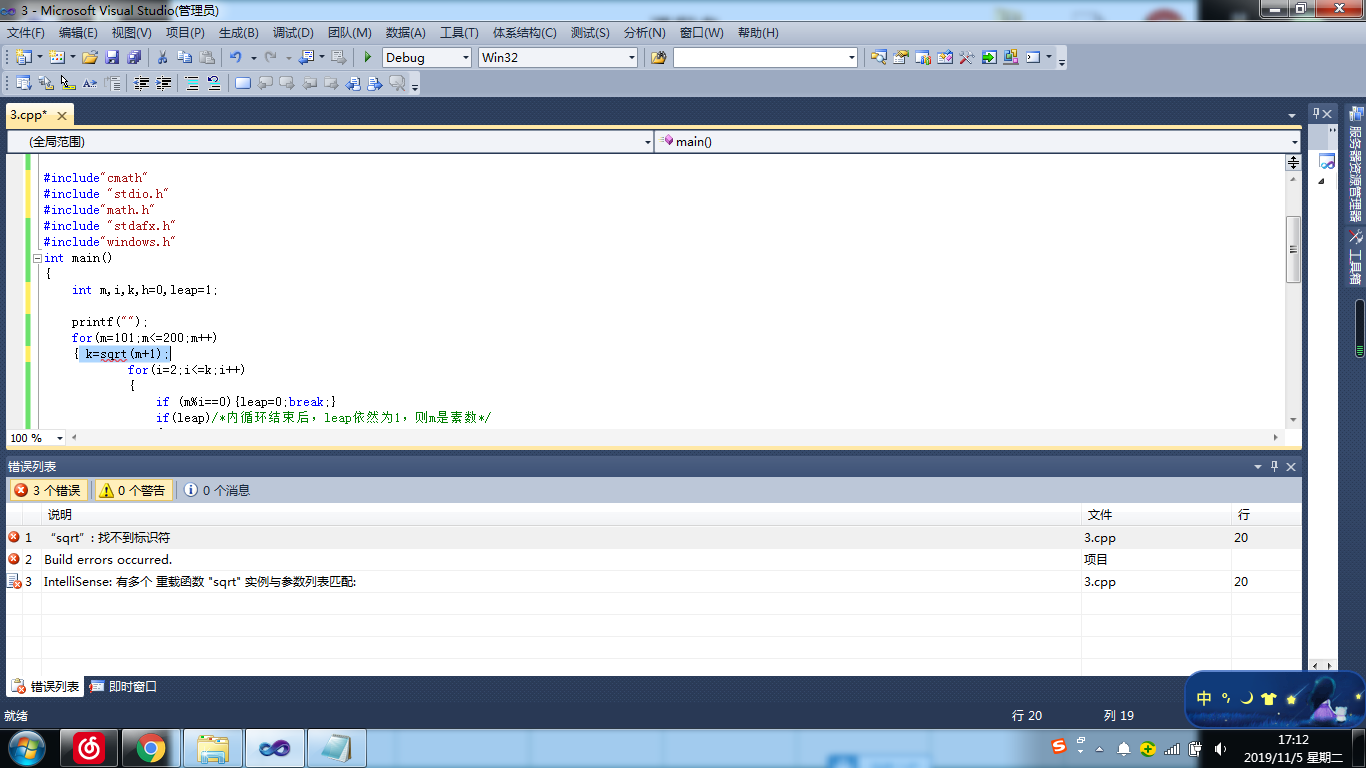
小白上路不太懂,求求大佬帮帮忙!!谢谢!! 错误提示栏提示:找不到标识符? 不知道是因为安装时没安装完全还是其他的原因?遇到这种问题改怎么解决呀?
收起
关键是这行“有多个重载函数sqrt实例与参数列表匹配。 可能是因为同时用了cmath和math.h。 只用一个试试,或者把参数改成浮点数据试试。
报告相同问题?

 分享
分享 分享
分享

