电赛衍生问题,步进电机+pycharm+arduini,识别三色物块和靶标问题。

 分享
分享
晚上好🌙🌙🌙
本答案参考通义千问
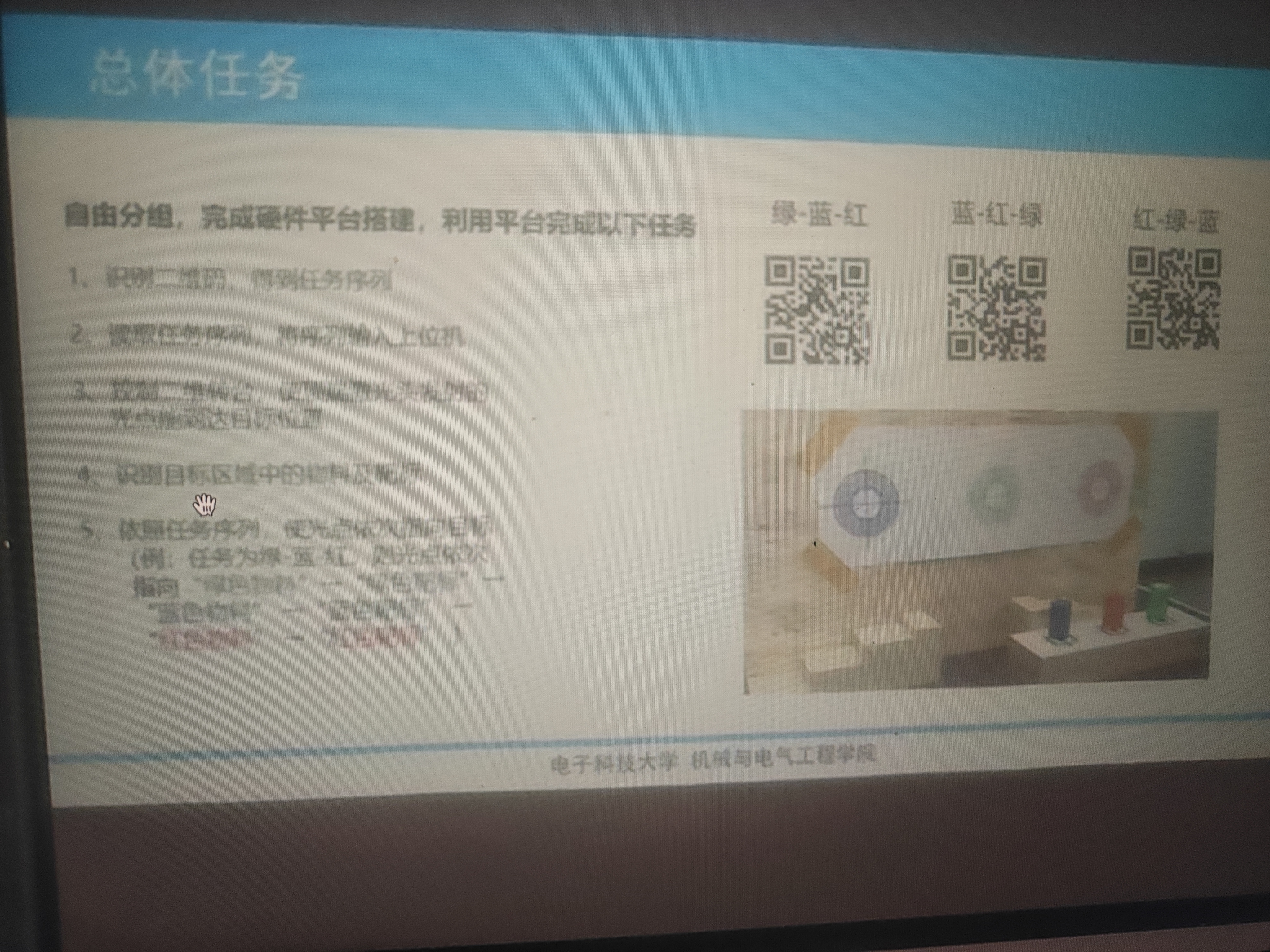
在电赛(电子设计竞赛)中,识别三色物块和靶标是一个典型的图像处理与控制结合的问题。该问题通常涉及以下技术模块:
你需要实现的功能包括:
+---------------------+
| PyCharm (PC) |
| - 图像识别 |
| - 串口通信 |
| - 逻辑控制 |
+----------+----------+
|
| 串口通信
v
+---------------------+
| Arduino |
| - 步进电机控制 |
| - 接收指令 |
+---------------------+
使用OpenCV进行颜色识别(以红色、绿色、蓝色为例)。
代码示例(Python + OpenCV):
import cv2
import numpy as np
# 定义颜色范围(HSV)
def detect_color(frame):
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 红色范围(注意HSV的范围是0-180)
red_lower = np.array([0, 100, 100])
red_upper = np.array([10, 255, 255])
# 绿色范围
green_lower = np.array([40, 40, 40])
green_upper = np.array([80, 255, 255])
# 蓝色范围
blue_lower = np.array([100, 100, 100])
blue_upper = np.array([140, 255, 255])
# 创建掩膜
mask_red = cv2.inRange(hsv, red_lower, red_upper)
mask_green = cv2.inRange(hsv, green_lower, green_upper)
mask_blue = cv2.inRange(hsv, blue_lower, blue_upper)
# 检测颜色
if cv2.countNonZero(mask_red) > 100:
return "Red"
elif cv2.countNonZero(mask_green) > 100:
return "Green"
elif cv2.countNonZero(mask_blue) > 100:
return "Blue"
else:
return "No Color"
# 主函数
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
color = detect_color(frame)
print("Detected Color:", color)
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
重点: 通过HSV色彩空间更准确地识别颜色,避免光照变化影响。
使用 pyserial 库进行串口通信。
安装依赖:
pip install pyserial
发送命令示例(Python):
import serial
import time
ser = serial.Serial('COM3', 9600, timeout=1) # 根据实际情况修改串口号
time.sleep(2)
color = "Red" # 假设检测到红色
ser.write(color.encode())
print("Sent:", color)
Arduino 接收串口指令,并控制步进电机转动。
Arduino 示例代码:
#include <Stepper.h>
// 定义步进电机引脚
const int stepsPerRevolution = 200; // 200步/圈
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); // 8,9,10,11 是步进电机的引脚
void setup() {
Serial.begin(9600);
myStepper.setSpeed(60); // 设置转速
}
void loop() {
if (Serial.available()) {
char command = Serial.read();
if (command == 'R') {
myStepper.step(100); // 向右转100步
} else if (command == 'G') {
myStepper.step(-100); // 向左转100步
} else if (command == 'B') {
myStepper.step(200); // 前进200步
}
}
}
重点: 通过串口接收指令,控制步进电机转动方向和步数。
若需识别靶标(如圆形、十字形),可以结合轮廓检测或模板匹配。
示例代码(OpenCV轮廓检测):
def detect_target(frame):
gray = cv2.cvtColor(frame, cv::COLOR_BGR2GRAY)
_, thresh = cv2.threshold(gray, 127, 255, 0)
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
area = cv2.contourArea(cnt)
if area > 500: # 过滤小区域
approx = cv2.approxPolyDP(cnt, 0.02 * cv2.arcLength(cnt, True), True)
if len(approx) == 4: # 四边形
return "Target"
return "No Target"
+-----------------------+
| 图像采集 |
+----------+------------+
|
v
+-----------------------+
| 颜色/靶标识别 |
+----------+------------+
|
v
+-----------------------+
| 发送指令至 Arduino |
+----------+------------+
|
v
+-----------------------+
| Arduino 控制电机 |
+-----------------------+
如果你需要我帮你生成完整的项目文件结构或打包成可运行的项目,请告诉我!
分享 创建了问题
3月25日
创建了问题
3月25日

