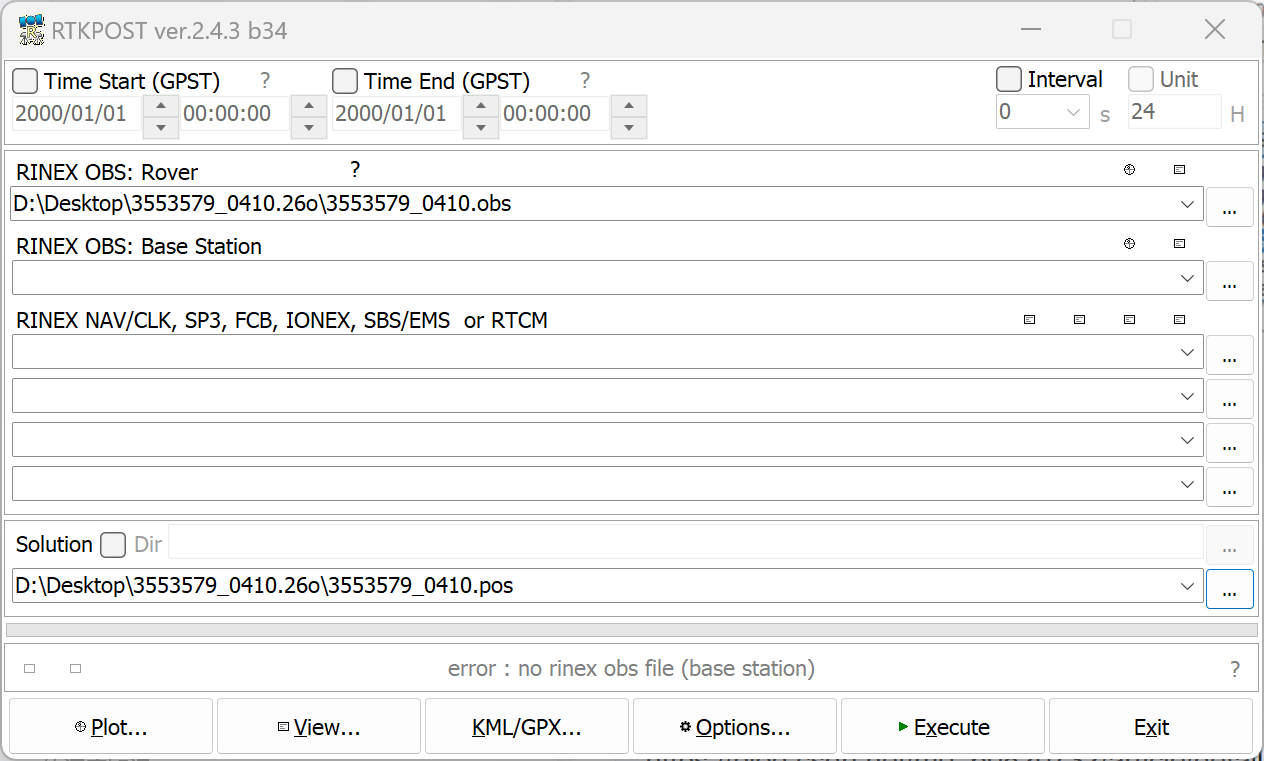
我现在只有.O文件,没有nav文件
能获取什么数据?
要怎么得到原始数据和变化量

我现在只有.O文件,没有nav文件
能获取什么数据?
要怎么得到原始数据和变化量
 分享
分享
上午好☀️☀️☀️️
本答案参考通义千问
你提到的 RPKPOST 是一个用于处理 GPS/IMU 数据 的后处理工具,通常用于将 .o 文件(原始数据文件) 转换为更易读和分析的格式,例如 nav 文件(导航数据文件)。你目前只有 .o 文件,没有 nav 文件,这确实限制了你可以直接获取的数据类型。
在没有 nav 文件的情况下,你仍然可以从 .o 文件中提取一些基础信息,包括但不限于:
这些数据虽然不经过滤波或解算,但可以用于后续的自定义处理和分析。
.o 文件获取原始数据和变化量?.o 文件.o 文件。txt 或 csv)。注意: RPKPOST 默认不会自动生成
nav文件,除非你明确设置为“Post-processing mode”并进行差分处理。
.o 文件(适用于高级用户).o 文件通常是二进制文件,可以通过编程方式读取,例如使用 Python 或 C++。
import numpy as np
# 打开 .o 文件
with open('your_file.o', 'rb') as f:
data = np.fromfile(f, dtype=np.float64)
# 按照 RPKPOST 的数据结构进行解析
# 例如,假设每个记录有 10 个字段(具体需根据实际文件结构调整)
record_size = 10
num_records = len(data) // record_size
for i in range(num_records):
record = data[i * record_size : (i + 1) * record_size]
print(f"Record {i}: {record}")
说明: 你需要知道
.o文件的具体数据结构(如每条记录的字段顺序和含义),否则无法正确解析。
nav 文件(推荐)如果你希望获取更高质量的导航数据(如定位精度、姿态角等),建议你尝试生成 nav 文件。
.o 文件和参考站数据(如果有)。nav。nav 文件。提示: 如果没有参考站数据,只能获得单点定位结果(精度较低)。
“变化量”通常指的是相对于某个初始状态的增量,例如:
要获取这些变化量,你需要:
nav 文件中提取原始导航数据(如位置、速度、姿态)import pandas as pd
# 读取 nav 文件(假设是 CSV 格式)
df = pd.read_csv('output.nav')
# 计算位置变化
df['dx'] = df['X'].diff()
df['dy'] = df['Y'].diff()
df['dz'] = df['Z'].diff()
# 计算速度变化
df['dvx'] = df['Vx'].diff()
df['dvy'] = df['Vy'].diff()
df['dvz'] = df['Vz'].diff()
# 保存结果
df.to_csv('output_with_changes.csv', index=False)
.o 文件能获取什么?如何获取?| 项目 | 是否可获取 | 说明 |
|------|------------|------|
| 原始 GPS 数据 | ✅ | 可通过 RPKPOST 或手动解析获取 |
| IMU 数据 | ✅ | 同上 |
| 时间戳 | ✅ | 包含在 .o 文件中 |
| 卫星观测数据 | ✅ | 需要特定解析方法 |
| 导航数据(如位置、速度、姿态) | ❌ | 需要生成 nav 文件 |
| 变化量(ΔX, ΔY, ΔZ 等) | ❌ | 需要生成 nav 文件并计算 |
nav 文件,以获得高质量导航数据。nav 文件,则尝试手动解析 .o 文件,并结合原始数据进行分析。如果你能提供具体的 .o 文件内容或格式,我可以进一步帮助你解析和提取所需数据。
分享 创建了问题
4月24日
创建了问题
4月24日
