如题,现考虑使用贝塞尔曲线对原路径进行平滑,但是现在不知道怎么考虑对静态障碍物的规避。需要让平滑后的路径根据已知的障碍物进行一定的调整,但仍保持整体的曲率连续。
所使用的是栅格地图,C++开发。

贝塞尔曲线平滑后的轨迹怎么规避静态障碍物?

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


9条回答 默认 最新
 小小y979 2023-03-10 16:45关注
小小y979 2023-03-10 16:45关注对于栅格地图中的贝塞尔曲线平滑路径,需要进行静态障碍物的规避,可以考虑以下步骤:
确定障碍物的位置:在栅格地图中,可以通过遍历地图,找到障碍物所在的栅格,记录下来。
在贝塞尔曲线上插入避障点:对于每个障碍物,可以在贝塞尔曲线上插入一个避障点,使得路径绕开障碍物。避障点的位置可以根据贝塞尔曲线的参数方程计算得到。具体来说,可以通过计算每个障碍物与贝塞尔曲线的最短距离,然后将避障点插入到该距离对应的曲线参数位置上。
调整贝塞尔曲线:在插入避障点后,需要重新计算贝塞尔曲线的控制点,使得路径保持曲率连续。具体来说,可以采用贝塞尔曲线的拟合方法,通过已知的路径点和避障点,计算出新的控制点。
根据调整后的贝塞尔曲线生成路径:根据调整后的贝塞尔曲线,可以生成新的平滑路径,用于避开障碍物。
需要注意的是,避障点的位置和数量需要根据具体情况进行调整,以保证路径能够避开障碍物并且不会离开可行区域。同时,对于动态障碍物,还需要实时更新避障点的位置,以保证路径的有效性。
以下是一个简单的C++代码示例,用于在贝塞尔曲线上插入避障点:// 假设已经得到了贝塞尔曲线的参数方程 // p0, p1, p2, p3 分别表示控制点和起点终点 // obs_x, obs_y 分别表示障碍物的坐标 // threshold 表示插入避障点的阈值 void insert_obstacle_point(double p0, double p1, double p2, double p3, double obs_x, double obs_y, double threshold, std::vector<double>& new_params) { double min_dist = std::numeric_limits<double>::max(); double min_t = 0.0; for (double t = 0.0; t <= 1.0; t += 0.01) { double x = pow(1 - t, 3) * p0 + 3 * pow(1 - t, 2) * t * p1 + 3 * (1 - t) * pow(t, 2) * p2 + pow(t, 3) * p3; double y = pow(1 - t, 3) * p0 + 3 * pow(1 - t, 2) * t * p1 + 3 * (1 - t) * pow(t, 2) * p2 + pow(t, 3) * p3; double dist = std::sqrt(std::pow(x - obs_x, 2) + std::pow(y - obs_y, 2)); if (dist < min_dist) { min_dist = dist; min_t = t; } } if (min_dist < threshold) { double new_t = std::max(0.0, std::min(1.0, min_t + (threshold - min_dist) / 10.0)); new_params.push_back(p0); new_params.push_back(p1); new_params.push_back(p2); new_params.push_back(p3); new_params.push_back(new_t); } return; }其中,new_params 表示新的贝塞尔曲线参数,threshold 表示插入避障点的阈值,如果障碍物与曲线距离小于该值,则插入避障点。
本回答被题主选为最佳回答 , 对您是否有帮助呢?评论 打赏解决 1无用举报 编辑记录 分享
- 2023-03-10 16:35回答 9 已采纳 对于栅格地图中的贝塞尔曲线平滑路径,需要进行静态障碍物的规避,可以考虑以下步骤: 确定障碍物的位置:在栅格地图中,可以通过遍历地图,找到障碍物所在的栅格,记录下来。 在贝塞尔曲线上插入避障点:对于每个
- 2023-03-17 16:22回答 5 已采纳 参考GPT和自己的思路,下面是基于Python的代码示例,实现输入路径的分段低阶贝塞尔曲线平滑,并考虑静态障碍物的避让: import cv2 import numpy as np from scip
- 2022-03-17 22:21回答 1 已采纳 b样条曲线是贝塞尔曲线的推广,贝塞尔曲线是b样条曲线在基函数次数等于控制点数时的特例,b样条曲线有贝塞尔曲线没有的局部支撑性,因此还需要b样条曲线
- 2022-07-11 06:55脑语言的博客 这是脑语言v0.5.8版的2500个单字(也称为“令”与“一令”),通过【单字编程】(并不仅是中文编程,而是混合英文关键字,但以单字为主的命名)也许是英文不太好时又希望能写代码的其中一种方式。 我在做脑语言...
- 2022-08-08 17:31回答 1 已采纳 可以参考一下 Unity 之 贝塞尔曲线介绍和实际使用_陈言必行的博客-CSDN博客_unity 贝塞尔曲线 Unity 中对贝塞尔曲线的实
- 2022-03-20 12:30回答 1 已采纳 可以采用杨辉三角 %计算杨辉三角 for i=1:n t(i, 1) = 1; t(i, i) = 1; end if n>=3 for i=3:n fo
- 2018-02-18 13:42回答 4 已采纳 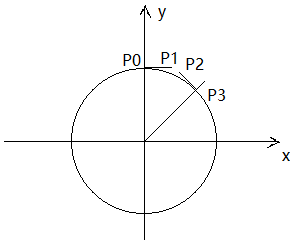 如图,我们以P0为起点,P3为终点画圆。因此起点坐标
- 2020-01-03 15:14gophae的博客 本文介绍如何实现基于Frenet坐标系的动态障碍物避障。其中包括: cubic spline generation Frenet transformation to gloval coordnates sampling-based search method Bezier curve cost function formalization ...
- 2016-01-24 03:58回答 6 已采纳 可以看http://blog.csdn.net/xiaoxiaobukuang/article/details/50391664
- 2017-08-24 15:12回答 1 已采纳 http://blog.csdn.net/aimeimeits/article/details/72809382 http://www.cnblogs.com/flash3d/archive/2
- 2020-09-28 12:03回答 1 已采纳 1 怎样确定 Bezier 曲线的控制点 (一) 设在平面上已知有 1n 个数据点 ),(iiiyxP,ni,,2,1,0。要求在相邻的每两个点 iP 与 1iP 之间,用一条3次Bezie
- 2022-04-09 15:12混沌无形的博客 贝塞尔曲线 Han等人综合局部栅格图中的全局路径及障碍物影响以确定控制点,生成无碰撞的四阶贝塞尔曲线作为局部路径,并使用PID控制器根据曲线[6]。 如图 2.3所示,González等人针对单岔口、连续岔口场景使用三阶...
- 2017-07-24 09:28回答 4 已采纳 你应该是写错了,重置应该是mPath.reset();
- 2024-04-07 10:50csdn_Flying的博客 到这一步,osqp库已经编译完成,如果不想安装在系统上使用,想直接使用静态库或动态库的话,只需要将osqp/include的头文件和osqp/build/out下的libosqp.a或者libosqp.so复制到自己的工程中使用即可。在编译OSQP-...
- 2022-02-08 22:05脑语言的博客 脑语言一令是一个不断变化的过程,而我们的能力也十分有限,对于翻译不准确、表达不合适、定义不严谨、意思不合理等等问题都是我做得还不够好的原因,欢迎指正与交流,以便通过“共产”的方式让“广集天下智慧”的...
- 没有解决我的问题, 去提问


问题事件
 系统已结题
3月25日
系统已结题
3月25日 已采纳回答
3月17日
已采纳回答
3月17日-
创建了问题
3月10日
悬赏问题
- ¥20 机器学习能否像多层线性模型一样处理嵌套数据
- ¥20 西门子S7-Graph,S7-300,梯形图
- ¥50 用易语言http 访问不了网页
- ¥50 safari浏览器fetch提交数据后数据丢失问题
- ¥15 matlab不知道怎么改,求解答!!
- ¥15 永磁直线电机的电流环pi调不出来
- ¥15 用stata实现聚类的代码
- ¥15 请问paddlehub能支持移动端开发吗?在Android studio上该如何部署?
- ¥20 docker里部署springboot项目,访问不到扬声器
- ¥15 netty整合springboot之后自动重连失效