
本菜鸡想用stm32103的板子控制两路舵机,就干脆直接在pwm程序上改了。我查了一下TIM3通道2的复用口的PB5,我就加一个通道1的复用口的PB4。
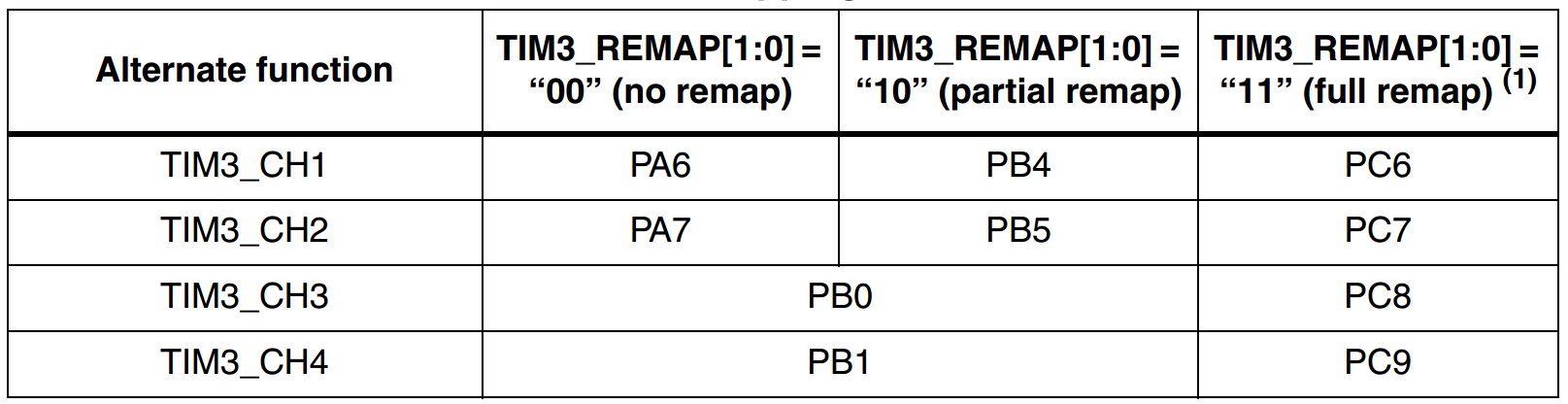
但结果是原来的PB5口好用得很,但新加的PB4口毛用没有。求大神帮我解答,万分感谢!
void TIM3_PWM_Init(u16 arr,u16 psc)
{
//定义变量
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//IO口配置
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
//使能PA4、PA5
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//定时器通用配置
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
//通道1配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
//通道2配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();
TIM3_PWM_Init(20000-1,72-1);
while(1)
{
TIM_SetCompare2(TIM3,20000-500);
TIM_SetCompare1(TIM3,20000-500);
delay_ms(1000);
TIM_SetCompare2(TIM3,20000-550);
TIM_SetCompare1(TIM3,20000-550);
delay_ms(1000);
}
}







