如图所示为平面3自由度6R并联机器人结构简图,假设AB=l1,BC=l2,CD=l3,DE=l4,EF=l5,AF=l6,杆CD为机构的动平台,杆AF为机架,建立固定参考坐标系o-xy,坐标原定位于AF的中心,x轴沿AF方向,y轴垂直于AF, A点在当前坐标系下的坐标值为(x,y),速度为vA,加速度为aA。三个驱动关节的转角分别为θ3,θ4,θ5,三个驱动关节的角速度为w3, w4, w5,分别对动平台参考点Q的位置坐标(xQ,yQ),速度vQ,加速度aQ进行求解。有没有什么好的办法?如果用matlab如何实现?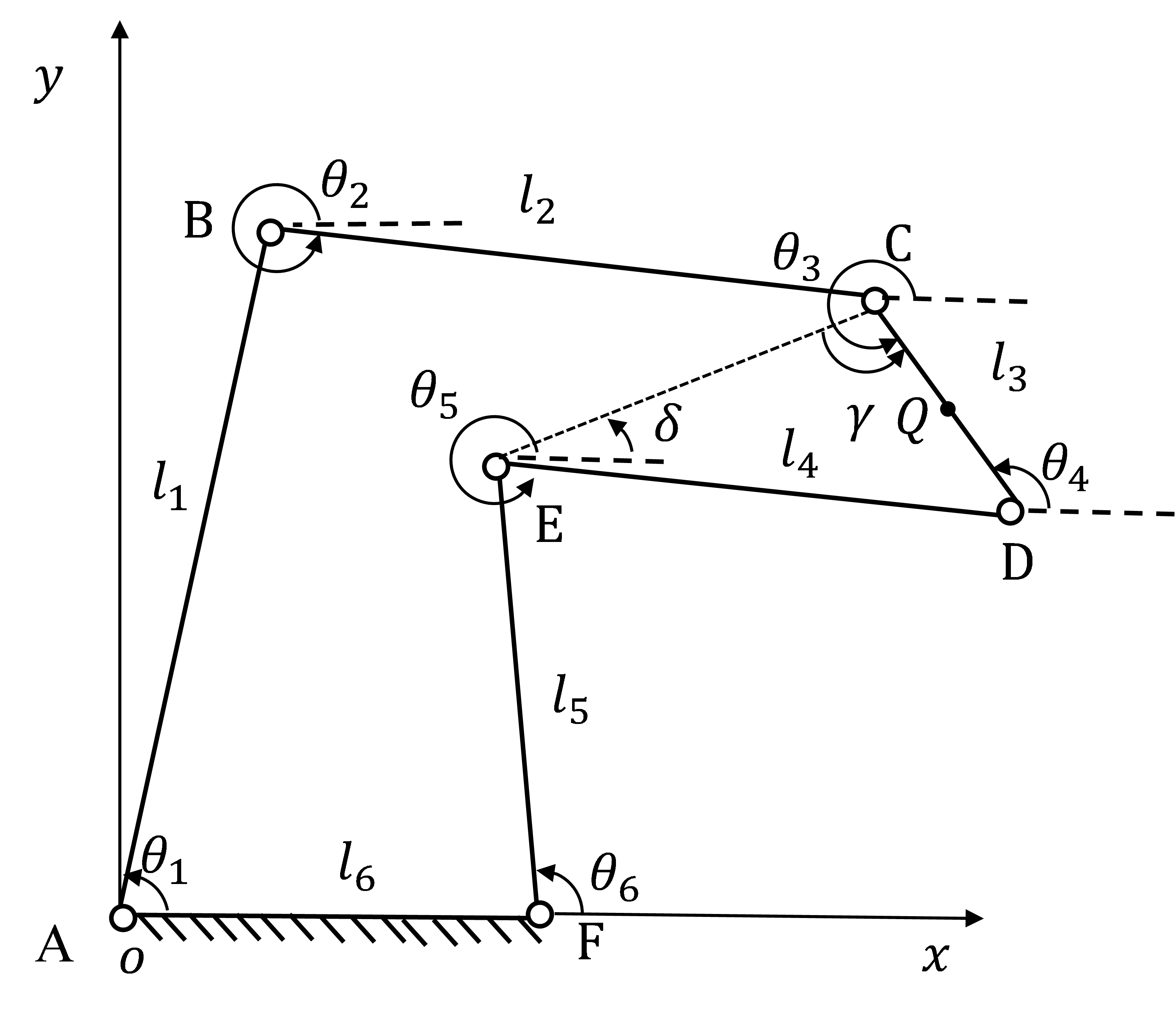

对平面3自由度6R并联机器人进行正解分析

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

- 2017-03-08 03:37回答 2 已采纳 Here's how to write comma separated key-value pairs using a template function. Declare a functio
- 2016-09-24 09:06回答 2 已采纳 OK, sorry about all this mess but what worked for me is to uninstall Go and reinstall it again. Pr
- 2022-05-06 11:10回答 2 已采纳 正则表达式即可<img src=\\"([\S\s]*?)" ` content: "<p><img src=\"data:image/jpeg;base64,/9j/4AA
- 2021-08-13 00:16#资源达人分享计划#
- 2022-04-26 11:30回答 3 已采纳 看一下响应头
- 2022-05-09 16:54回答 4 已采纳 我这里运行,修改了这个位置。结果打印:
- 2022-03-05 23:40回答 1 已采纳 报错提示你,无效的字符相关,你将: # 这个是后边dns要用的虚拟网络的网关,不用改,就用这个切忌 这个删除,别留多余的空格。严格讲,很多语法格式都严格要求。
- 2021-10-31 21:51基于Matlab的QJ-6R焊接机器人运动学分析及仿真.pdf
- 2022-08-12 14:14回答 1 已采纳 你看一下这个行不行: import java.util.ArrayList; import java.util.Collections; import java.util.Scanner; /**
- 2014-10-10 07:12回答 2 已采纳 you can decode it using below urls: 1) http://www.tareeinternet.com/scripts/decrypt.php 2) http:/
- 2020-04-13 11:26回答 1 已采纳 https://www.cnblogs.com/peter-le/p/6055782.html
- 2021-08-11 23:44#资源达人分享计划#
- 2019-04-04 18:30回答 1 已采纳 To decrypt encrypted pkcs8 key (an example of such key is mentioned in the question) in go there
- 2021-08-12 23:49#资源达人分享计划#
- 2021-08-14 13:49双臂6R服务机器人的协作空间分析与仿真.pdf
- 2022-07-13 20:286R工业机器人逆运动学计算程序,机器人类型有三个轴平行
- 2021-08-11 23:47#资源达人分享计划#
- 2021-08-14 20:19#资源达人分享计划#
- 2021-08-14 13:456R机器人轨迹规划目标逆解精度优化算法.pdf
- 2021-08-13 22:11#资源达人分享计划#
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 基于卷积神经网络的声纹识别
- ¥15 Python中的request,如何使用ssr节点,通过代理requests网页。本人在泰国,需要用大陆ip才能玩网页游戏,合法合规。
- ¥100 为什么这个恒流源电路不能恒流?
- ¥15 有偿求跨组件数据流路径图
- ¥15 写一个方法checkPerson,入参实体类Person,出参布尔值
- ¥15 我想咨询一下路面纹理三维点云数据处理的一些问题,上传的坐标文件里是怎么对无序点进行编号的,以及xy坐标在处理的时候是进行整体模型分片处理的吗
- ¥15 CSAPPattacklab
- ¥15 一直显示正在等待HID—ISP
- ¥15 Python turtle 画图
- ¥15 stm32开发clion时遇到的编译问题