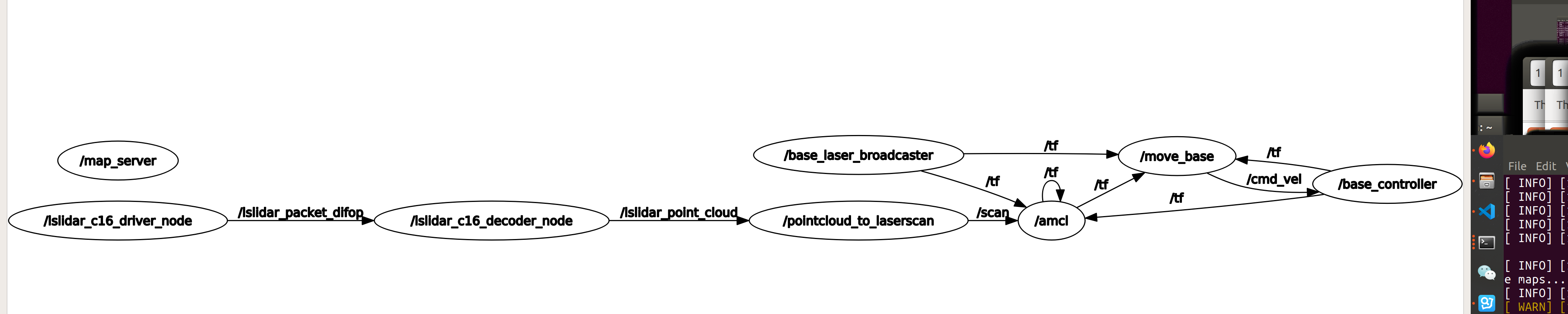
用16线激光雷达, point_cloud_to_laserscan转成scan, 用cartographer建好地图直接用.
导航包报错:Timed out waiting for transform from base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100487 timeout was 0.1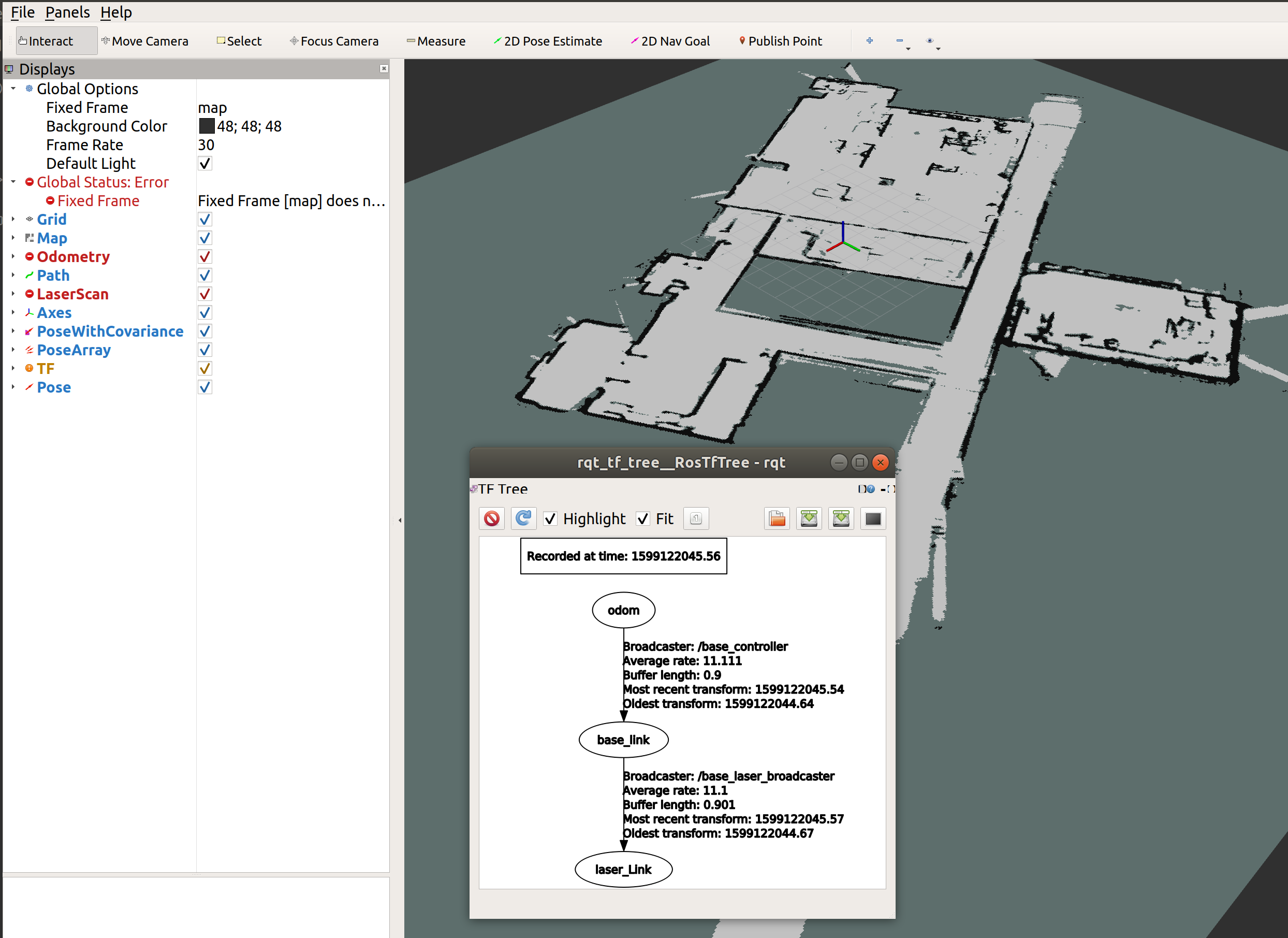

amcl不发布map-odom的坐标变换的原因是什么?

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新

- 2021-02-20 23:12诗筱涵的博客 2D激光SLAM::AMCL发布的odom----map坐标TF变换解读 dieju8330 2019-07-24 21:56:08 2896 收藏 41 分类专栏: 2D激光SLAM ROS 版权 AMCL发布的odom----map坐标TF变换解读 一、背景 1、AMCL的作用是什么? ...
- 2020-03-12 19:11Better-ing的博客 我记得这段代码好像在amcl_node包里面,应该可以找到。 1. ROS_DEBUG("New pose: %6.3f %6.3f %6.3f", 2. hyps[max_weight_hyp].pf_pose_mean.v[0], 3. hyps[max_weight_hyp].pf_pose_mean.v[1], 4. ...
- 2019-07-10 22:49llz56的博客 https://blog.csdn.net/crazyquhezheng/article/details/49154805
- 2025-07-17 20:17Lilgeneric的博客 map、odom、base_footfrint坐标系区别,RVIZ中模型闪烁问题解决记录
- 2025-02-24 21:27YRr YRr的博客 map坐标系,也称为地图坐标系,是一个全局固定的参考坐标系,用于表示机器人所在环境的静态地图。提供机器人进行全局路径...map坐标系提供全局参考,odom坐标系记录机器人即时运动,base_link坐标系代表机器人本体。
- 2025-03-18 22:16YRr YRr的博客 在机器人操作系统(ROS)中,理解不同的坐标系及其相互关系是进行机器人导航与定位的基础。这四大坐标系及其相互关系,开发者可以更有效地进行机器人系统的设计与调试,提升机器人的自主性和可靠性。理解并正确使用...
- 2020-04-05 12:32wongHome的博客 学了ROS半年多,依旧对map坐标系、odom坐标系、base_link坐标系不是很理解,这段时间下定决心要捋清楚他们之间的关系。 map坐标系:地图坐标系,是一个固定的坐标系; base_link:机器人本体坐标系,一般和机器人的...
- 2024-11-26 10:59、达西先生的博客 是的,当你使用rostopic echo /odom命令来查看/odom话题时,显示的位置和姿态数据是相对于odom坐标系的。这里指定robotBaseFrame是叫base_footprint的link,输入是相对于odom坐标系的。机器人模型里添加的Gazebo控件...
- 2020-12-09 22:4310YrS的博客 现在已有基于视觉slam建立的map地图,但在该地图基础上想进行导航规划时,发现map和odom并没有建立正确的tf关系。 参考: AMCL中map->odom的转换 ROS_DEBUG("New pose: %6.3f %6.3f %6.3f", hyps[max_weight...
- 2020-04-10 11:34kuai-的博客 传送门
- 2023-02-03 08:11HGGshiwo的博客 只是一个概念上的坐标系,实际不存在如果说完全相信传感器的数据,那么可以认为odom坐标系就是map坐标系如何计算odom坐标系相对于map坐标系的位置:首先获得差速计推算出的小车坐标p,然后使用雷达再次估算小车的...
- 2021-07-27 15:49流的夜的博客 在AMCL中,这个算法是根据给定的地图,结合粒子滤波获取最佳定位点Mp,这个定位点是相对于地图map上的坐标,也就是base_link(也就是机器人的基坐标)相对map上的坐标。我们知道odom 的原点是机器人启动时刻的位置,...
- 2024-01-27 14:15还重名就过分了啊的博客 根据《ROS机器人开发实践》上相关内容,ACML功能包中的话题和服务有:所以启动定位导航包后,有话题amcl_pose发布,即为机器人在地图中的位姿估计,带有协方差信息,也即得到了map->base_footprint变换信息。...
- 2022-08-12 15:04Rhys___的博客 odom到base_link的转换是由里程计源计算和发布的。然而,定位模块不发布map到base_link的转换(transform)。相反,定位模块先接收odom到base_link的transform,并使用这个信息发布map到odom的transform。
- 2021-08-16 19:15酸梅果茶的博客 文章目录1、map坐标系2、odom坐标系3、base_link坐标系4、base_laser坐标系5、总结 1、map坐标系 在构建地图时,机器人构建地图的起点位置就是map坐标系的位置。在导航节点,当加载地图时,map坐标系就确定了。 map...
- 2024-08-18 00:30听筒听筒听的博客 文章论述了ROS无人车中常用的坐标系及坐标变换的含义,并分析了EKF等算法在修正坐标系中的思路
- 没有解决我的问题, 去提问
