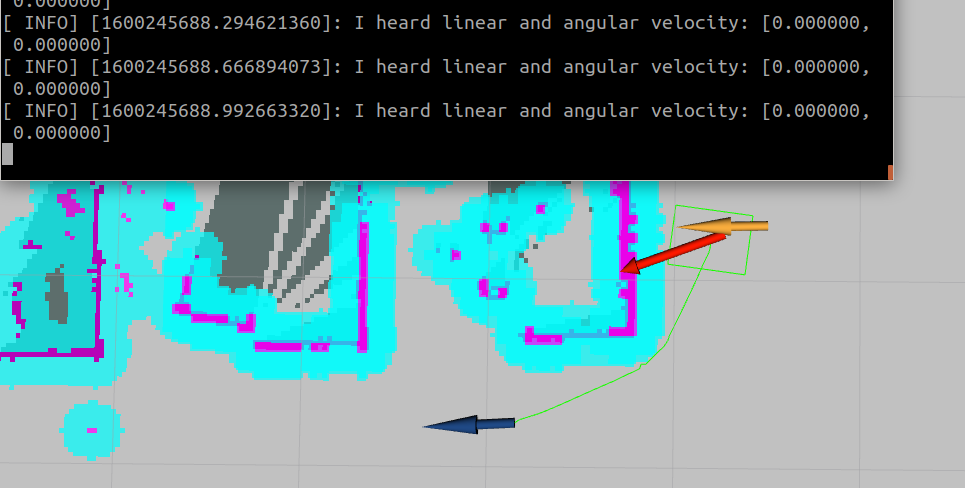
如图所示,在存在路径规划的情况下,一直下发线速度和角速度为0 的情况。
收起
https://blog.csdn.net/qq_29320587/article/details/104842330
报告相同问题?

 分享
分享


