
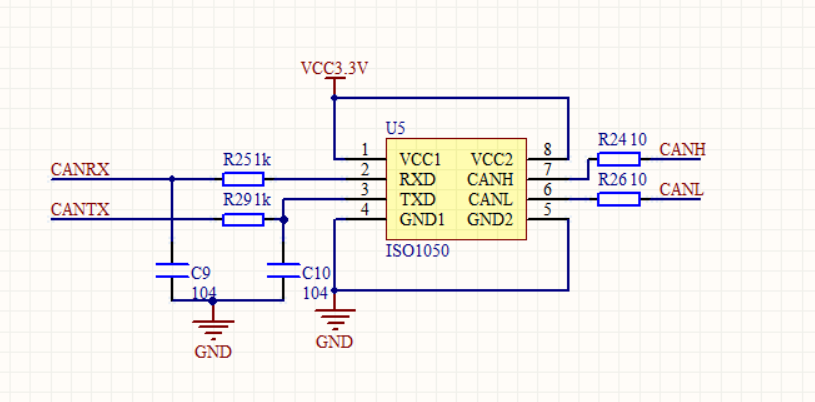
各位大佬好,这几天一直在调stm32的can通讯,好几天了都没做出来~~~~~~~,来这里求救了!!!!!!!我使用的是stm32f103rct6单片机,使用的程序模板是原子哥ALIENTEK 战舰 STM32F103 开发板can实验教程,使用的can收发器是ISO1050,手里有一个个usb/can转换器。现在单片机canRX,TX接到IS01050,1050出来的CANH、CANL接到转换器的CANH\CANL,没有接反。
设置成回环测试的时候,电脑通过转化器可以收到单片机发出的数据,数据也没有错误。设置成正常模式,单片机就发不出数据了。
PCB板上加了两个led,用来指示单片机引脚的canRX、TX引脚。正常模式的时候这两个灯没有回环测试的时候亮,基本上亮不起来了,而且正常模式的时候闪十几下就不亮了。
下面是配置程序:
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//ê1ÄüPORTAê±Öó
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//ê1ÄüCAN1ê±Öó
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸′óÃíÆíì
GPIO_Init(GPIOA, &GPIO_InitStructure); //3õê¼»ˉIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //éÏà-êäèë
GPIO_Init(GPIOA, &GPIO_InitStructure); //3õê¼»ˉIO
//CANμ¥ÔaéèÖÃ
CAN_InitStructure.CAN_TTCM=DISABLE; //·Çê±¼ä′¥·¢í¨DÅÄ£ê½
CAN_InitStructure.CAN_ABOM=DISABLE; //èí¼t×Ô¶ˉàëÏß1üàí
CAN_InitStructure.CAN_AWUM=DISABLE; //ËˉÃßÄ£ê½í¨1yèí¼t»½DÑ(Çå3yCAN->MCRμÄSLEEPλ)
CAN_InitStructure.CAN_NART=ENABLE; //½ûÖ1±¨ÎÄ×Ô¶ˉ′«Ëí
CAN_InitStructure.CAN_RFLM=DISABLE; //±¨ÎÄ2»Ëø¶¨,DÂμĸ2¸Ç¾éμÄ
CAN_InitStructure.CAN_TXFP=DISABLE; //óÅÏ輶ó鱨Îıê궷û¾ö¶¨
CAN_InitStructure.CAN_Mode= mode; //Ä£ê½éèÖão mode:0,ÆÕí¨Ä£ê½;1,»Ø»·Ä£ê½;
//éèÖÃ2¨ìØÂê
CAN_InitStructure.CAN_SJW=tsjw; //ÖØDÂí¬2½ìøÔ¾¿í¶è(Tsjw)Îatsjw+1¸öê±¼äμ¥λ CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1¸öê±¼äμ¥λCAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2; //Tbs2=tbs2+1¸öê±¼äμ¥λCAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //·ÖÆμÏμêy(Fdiv)Îabrp+1
CAN_Init(CAN1, &CAN_InitStructure); //3õê¼»ˉCAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //1yÂËÆ÷0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //Æá±ÎλÄ£ê½
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32λ¿í
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000; //32λID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32λMASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//1yÂËÆ÷01Øáaμ½FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;//¼¤»î1yÂËÆ÷0
CAN_FilterInit(&CAN_FilterInitStructure); //ÂË2¨Æ÷3õê¼»ˉ
return 0;
}
//can·¢Ëíò»×éêy¾Y(1춨¸ñê½:IDÎa0X12,±ê×¼Ö¡,êy¾YÖ¡)
//len:êy¾Y3¤¶è(×î′óÎa8)
//msg:êy¾YÖ¸Õë,×î′óÎa8¸ö×Ö½ú.
//·μ»ØÖμ:0,3é1|;
// ÆäËû,꧰ü;
u8 Can_Send_Msg(u8* msg,u8 len)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x12; // ±ê×¼±ê궷û
TxMessage.ExtId=0x12; // éèÖÃà©Õ1±êê¾·û
TxMessage.IDE=CAN_Id_Standard; // ±ê×¼Ö¡
TxMessage.RTR=CAN_RTR_Data; // êy¾YÖ¡
TxMessage.DLC=len; // òa·¢ËíμÄêy¾Y3¤¶è
for(i=0;i
TxMessage.Data[i]=msg[i];
mbox= CAN_Transmit(CAN1, &TxMessage);
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i
if(i>=0XFFF)return 1;
return 0;
}
//can¿ú½óêÕêy¾Y2éÑˉ
//buf:êy¾Y»o′æÇø;
//·μ»ØÖμ:0,ÎTêy¾Y±»êÕμ½;
// ÆäËû,½óêÕμÄêy¾Y3¤¶è;
u8 Can_Receive_Msg(u8 *buf)
{
u32 i;
CanRxMsg RxMessage;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //ûóD½óêÕμ½êy¾Y,Ö±½óíË3ö
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//¶áè¡êy¾Y
for(i=0;i<8;i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
}
下面是主程序:
#include "led.h"
#include "delay.h"
//#include "key.h"
#include "sys.h"
//#include "lcd.h"
//#include "usart.h"
#include "can.h"
int main(void)
{
u8 key;
u8 i=0,t=0;
u8 cnt=0;
u8 canbuf[8];
u8 res;
u8 mode=CAN_Mode_LoopBack;//CAN1¤×÷Ä£ê½;CAN_Mode_Normal(0)£oÆÕí¨Ä£ê½£¬CAN_Mode_LoopBack(1)£o»·»ØÄ£ê½
delay_init(); //Ñóê±oˉêy3õê¼»ˉ
//NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//éèÖÃÖD¶ÏóÅÏ輶·Ö×éÎa×é2£o2λÇàÕ¼óÅÏ輶£¬2λÏìó|óÅÏ輶
//uart_init(115200); //′®¿ú3õê¼»ˉÎa115200
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,20,CAN_Mode_Normal);//CAN3õê¼»ˉ»·»ØÄ£ê½,2¨ìØÂê100Kbps CAN_Mode_LoopBack CAN_Mode_Normal
while(1)
{
for(i=0;i<8;i++)
{
canbuf[i]=cnt+i;//ìî3ä·¢Ëí»o3åÇø
}
res=Can_Send_Msg(canbuf,8);//·¢Ëí8¸ö×Ö½ú
delay_ms(1500);
}
}图片说明](https://img-ask.csdn.net/upload/201711/23/1511431708_572832.png)





